正在加载图片...
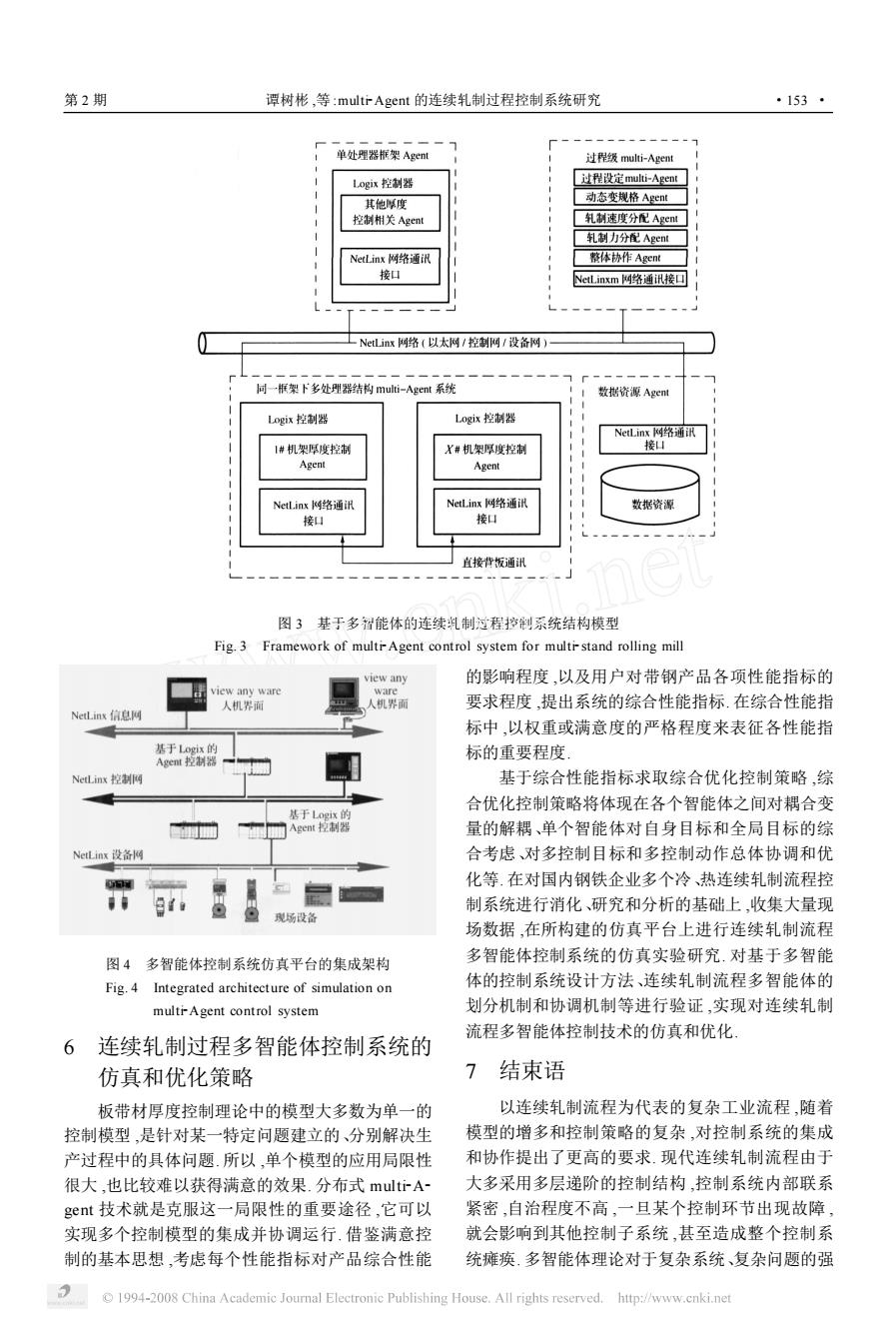
第2期 谭树彬,等:multi-Agent的连续轧制过程控制系统研究 ·153 单处理器框架Agent 过程级muli-Agent 1ogix控制器 过程设定multi-Agent 其他厚度 动态变规格Acn 控制相关Agent 轧制速度分配Agent 轧制力分配Agcn NetLinx网路通i讯 整体协作Agent 接口 NetLinxm网路通i讯接▣ NetLinx树络(以太网/控制网/设备网)- 同一根架下多处理器结构muli-Agent系统 数据资源Agent Logix控制器 Logix控制器 NetLinx网路通讯 1#机架厚度控制 X#机架厚度控制 接口 Agent Agent Netl.inxk4络通讯 NetLinx网络通讯 数据资源 接口 接口 直接节板通讯 图3基于多智能体的连续制过程控制系统结构模型 Fig.3 Framework of multiAgent control system for multistand rolling mill view any 的影响程度,以及用户对带钢产品各项性能指标的 view anv ware 人机界面 、机界面 要求程度,提出系统的综合性能指标.在综合性能指 NetLinx信息网 标中,以权重或满意度的严格程度来表征各性能指 基于Logx的 标的重要程度, Agem控制器 NetLinx控制网 基于综合性能指标求取综合优化控制策略,综 合优化控制策略将体现在各个智能体之间对耦合变 基于Logx的 Age制器 量的解耦、单个智能体对自身目标和全局目标的综 NetLinx设备网 合考虑、对多控制目标和多控制动作总体协调和优 化等.在对国内钢铁企业多个冷、热连续轧制流程控 制系统进行消化、研究和分析的基础上,收集大量现 现场设备 场数据,在所构建的仿真平台上进行连续轧制流程 图4多智能体控制系统仿真平台的集成架构 多智能体控制系统的仿真实验研究.对基于多智能 Fig.4 Integrated architecture of simulation on 体的控制系统设计方法、连续轧制流程多智能体的 multiAgent control system 划分机制和协调机制等进行验证,实现对连续轧制 流程多智能体控制技术的仿真和优化, 6 连续轧制过程多智能体控制系统的 仿真和优化策略 7结束语 板带材厚度控制理论中的模型大多数为单一的 以连续轧制流程为代表的复杂工业流程,随着 控制模型,是针对某一特定问题建立的、分别解决生 模型的增多和控制策略的复杂,对控制系统的集成 产过程中的具体问题.所以,单个模型的应用局限性 和协作提出了更高的要求.现代连续轧制流程由于 很大,也比较难以获得满意的效果.分布式multi-A- 大多采用多层递阶的控制结构,控制系统内部联系 gent技术就是克服这一局限性的重要途径,它可以 紧密,自治程度不高,一旦某个控制环节出现故障 实现多个控制模型的集成并协调运行.借鉴满意控 就会影响到其他控制子系统,甚至造成整个控制系 制的基本思想,考虑每个性能指标对产品综合性能 统瘫痪.多智能体理论对于复杂系统、复杂问题的强 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net图 3 基于多智能体的连续轧制过程控制系统结构模型 Fig. 3 Framework of multi2Agent control system for multi2stand rolling mill 图 4 多智能体控制系统仿真平台的集成架构 Fig. 4 Integrated architecture of simulation on multi2Agent control system 6 连续轧制过程多智能体控制系统的 仿真和优化策略 板带材厚度控制理论中的模型大多数为单一的 控制模型 ,是针对某一特定问题建立的、分别解决生 产过程中的具体问题. 所以 ,单个模型的应用局限性 很大 ,也比较难以获得满意的效果. 分布式 multi2A2 gent 技术就是克服这一局限性的重要途径 ,它可以 实现多个控制模型的集成并协调运行. 借鉴满意控 制的基本思想 ,考虑每个性能指标对产品综合性能 的影响程度 ,以及用户对带钢产品各项性能指标的 要求程度 ,提出系统的综合性能指标. 在综合性能指 标中 ,以权重或满意度的严格程度来表征各性能指 标的重要程度. 基于综合性能指标求取综合优化控制策略 ,综 合优化控制策略将体现在各个智能体之间对耦合变 量的解耦、单个智能体对自身目标和全局目标的综 合考虑、对多控制目标和多控制动作总体协调和优 化等. 在对国内钢铁企业多个冷、热连续轧制流程控 制系统进行消化、研究和分析的基础上 ,收集大量现 场数据 ,在所构建的仿真平台上进行连续轧制流程 多智能体控制系统的仿真实验研究. 对基于多智能 体的控制系统设计方法、连续轧制流程多智能体的 划分机制和协调机制等进行验证 ,实现对连续轧制 流程多智能体控制技术的仿真和优化. 7 结束语 以连续轧制流程为代表的复杂工业流程 ,随着 模型的增多和控制策略的复杂 ,对控制系统的集成 和协作提出了更高的要求. 现代连续轧制流程由于 大多采用多层递阶的控制结构 ,控制系统内部联系 紧密 ,自治程度不高 ,一旦某个控制环节出现故障 , 就会影响到其他控制子系统 ,甚至造成整个控制系 统瘫痪. 多智能体理论对于复杂系统、复杂问题的强 第 2 期 谭树彬 ,等 :multi2Agent 的连续轧制过程控制系统研究 · 351 ·