正在加载图片...
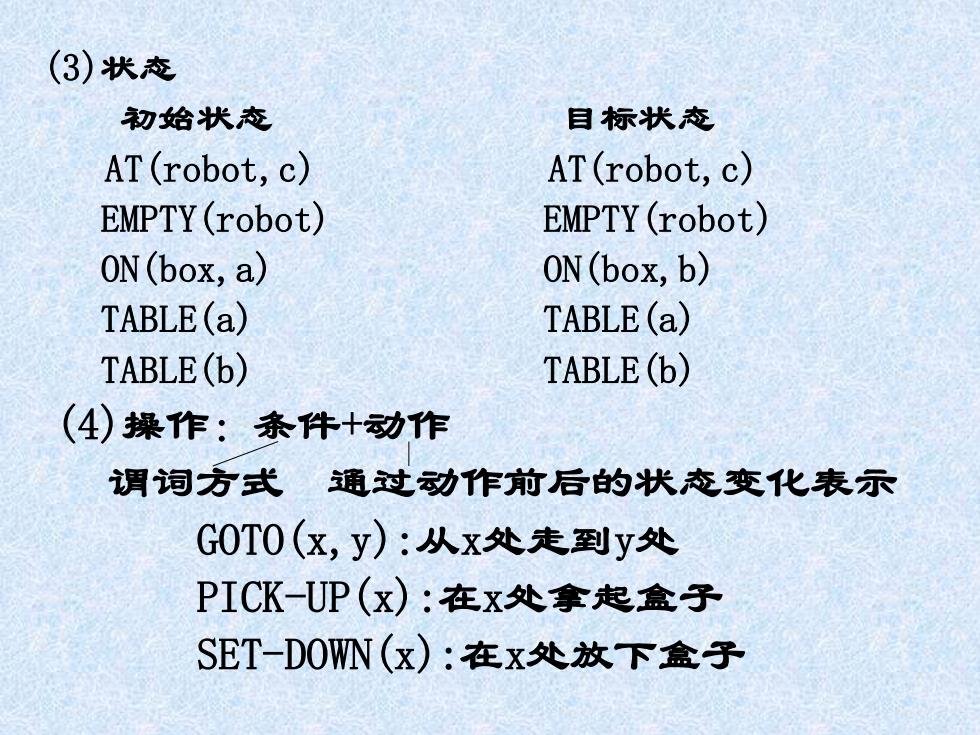
(3)状态 初始状态 目标状态 AT(robot,c) AT(robot,c) EMPTY(robot) EMPTY (robot) ON (box,a) ON(box,b) TABLE(a) TABLE (a) TABLE(b) TABLE(b) (4)操作:条件+动作 调词方式通过动作前后的状态变化表示 G0T0(x,y):从x处走到y处 PICK-UP(x):在x处拿起盒子 SET-DON(x):在x处放下盒子 (3)状态 初始状态 目标状态 AT(robot,c) AT(robot,c) EMPTY(robot) EMPTY(robot) ON(box,a) ON(box,b) TABLE(a) TABLE(a) TABLE(b) TABLE(b) (4)操作:条件+动作 谓词方式 通过动作前后的状态变化表示 GOTO(x,y):从x处走到y处 PICK-UP(x):在x处拿起盒子 SET-DOWN(x):在x处放下盒子