正在加载图片...
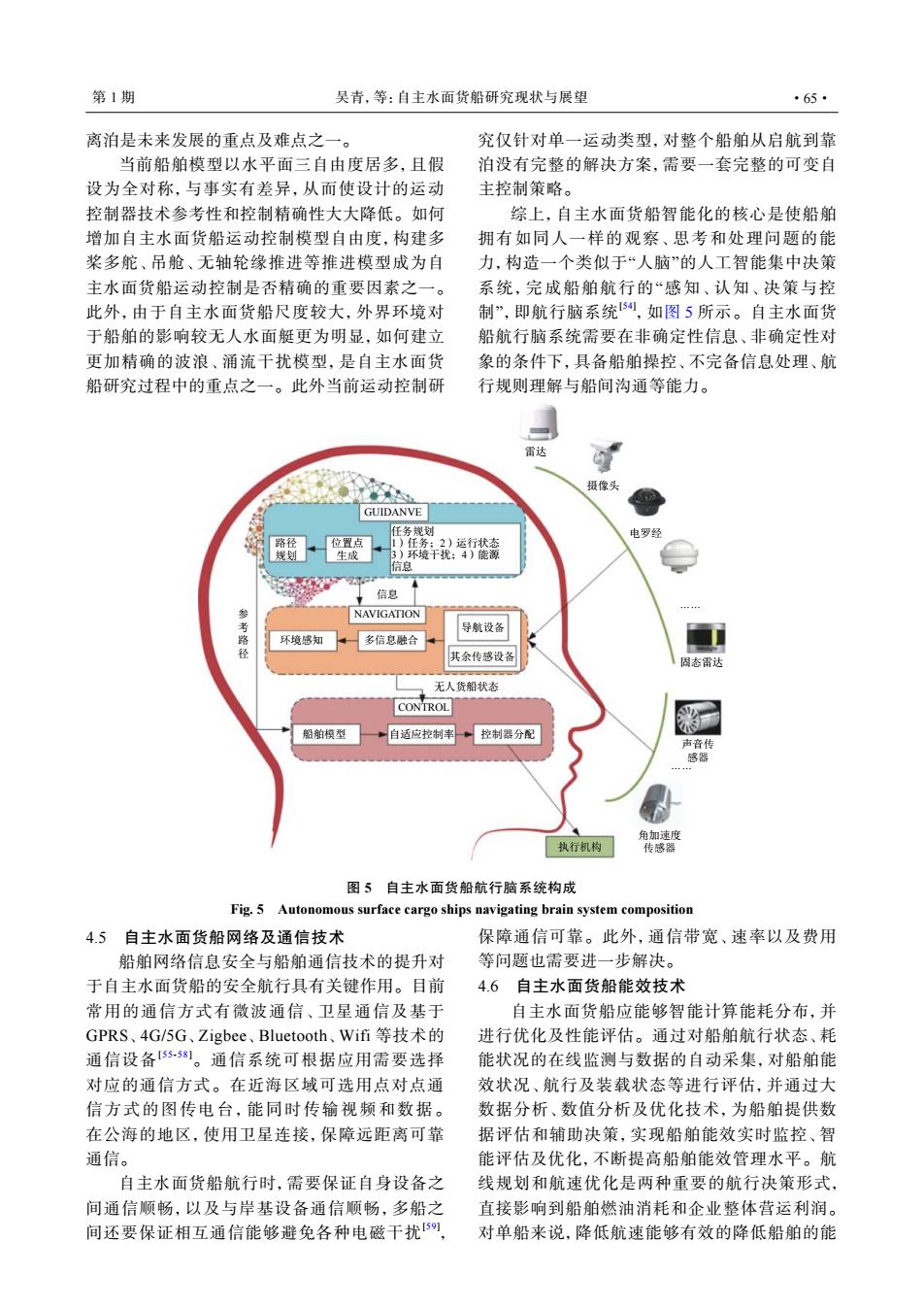
第1期 吴青,等:自主水面货船研究现状与展望 ·65· 离泊是未来发展的重点及难点之一。 究仅针对单一运动类型,对整个船舶从启航到靠 当前船舶模型以水平面三自由度居多,且假 泊没有完整的解决方案,需要一套完整的可变自 设为全对称,与事实有差异,从而使设计的运动 主控制策略。 控制器技术参考性和控制精确性大大降低。如何 综上,自主水面货船智能化的核心是使船舶 增加自主水面货船运动控制模型自由度,构建多 拥有如同人一样的观察、思考和处理问题的能 桨多舵、吊舱、无轴轮缘推进等椎进模型成为自 力,构造一个类似于“人脑”的人工智能集中决策 主水面货船运动控制是否精确的重要因素之一。 系统,完成船舶航行的“感知、认知、决策与控 此外,由于自主水面货船尺度较大,外界环境对 制”,即航行脑系统5,如图5所示。自主水面货 于船舶的影响较无人水面艇更为明显,如何建立 船航行脑系统需要在非确定性信息、非确定性对 更加精确的波浪、涌流干扰模型,是自主水面货 象的条件下,具备船舶操控、不完备信息处理、航 船研究过程中的重点之一。此外当前运动控制研 行规则理解与船间沟通等能力。 雷达 摄像头 GUIDANVE 任务规别 电罗经 路径 位置点 规划 生成 信息 信息 NAVIGATION 考 导航设备 环境感知 多信息融合 其余传感设备 固态雷达 无人货船状态 CONTROL 船舶模型 自适应控制率控制器分配 声音传 角加速度 执行机构 传感器 图5自主水面货船航行脑系统构成 Fig.5 Autonomous surface cargo ships navigating brain system composition 4.5自主水面货船网络及通信技术 保障通信可靠。此外,通信带宽、速率以及费用 船舶网络信息安全与船舶通信技术的提升对 等问题也需要进一步解决。 于自主水面货船的安全航行具有关键作用。目前 4.6自主水面货船能效技术 常用的通信方式有微波通信、卫星通信及基于 自主水面货船应能够智能计算能耗分布,并 GPRS、4G/5G、Zigbee、Bluetooth、Wif等技术的 进行优化及性能评估。通过对船舶航行状态、耗 通信设备551。通信系统可根据应用需要选择 能状况的在线监测与数据的自动采集,对船舶能 对应的通信方式。在近海区域可选用点对点通 效状况、航行及装载状态等进行评估,并通过大 信方式的图传电台,能同时传输视频和数据。 数据分析、数值分析及优化技术,为船舶提供数 在公海的地区,使用卫星连接,保障远距离可靠 据评估和辅助决策,实现船舶能效实时监控、智 通信。 能评估及优化,不断提高船舶能效管理水平。航 自主水面货船航行时,需要保证自身设备之 线规划和航速优化是两种重要的航行决策形式, 间通信顺畅,以及与岸基设备通信顺畅,多船之 直接影响到船舶燃油消耗和企业整体营运利润。 间还要保证相互通信能够避免各种电磁干扰$叭, 对单船来说,降低航速能够有效的降低船舶的能离泊是未来发展的重点及难点之一。 当前船舶模型以水平面三自由度居多,且假 设为全对称,与事实有差异,从而使设计的运动 控制器技术参考性和控制精确性大大降低。如何 增加自主水面货船运动控制模型自由度,构建多 桨多舵、吊舱、无轴轮缘推进等推进模型成为自 主水面货船运动控制是否精确的重要因素之一。 此外,由于自主水面货船尺度较大,外界环境对 于船舶的影响较无人水面艇更为明显,如何建立 更加精确的波浪、涌流干扰模型,是自主水面货 船研究过程中的重点之一。此外当前运动控制研 究仅针对单一运动类型,对整个船舶从启航到靠 泊没有完整的解决方案,需要一套完整的可变自 主控制策略。 综上,自主水面货船智能化的核心是使船舶 拥有如同人一样的观察、思考和处理问题的能 力,构造一个类似于“人脑”的人工智能集中决策 系统,完成船舶航行的“感知、认知、决策与控 制”,即航行脑系统[54] ,如图 5 所示。自主水面货 船航行脑系统需要在非确定性信息、非确定性对 象的条件下,具备船舶操控、不完备信息处理、航 行规则理解与船间沟通等能力。 4.5 自主水面货船网络及通信技术 船舶网络信息安全与船舶通信技术的提升对 于自主水面货船的安全航行具有关键作用。目前 常用的通信方式有微波通信、卫星通信及基于 GPRS、4G/5G、Zigbee、Bluetooth、Wifi 等技术的 通信设备[55-58]。通信系统可根据应用需要选择 对应的通信方式。在近海区域可选用点对点通 信方式的图传电台,能同时传输视频和数据。 在公海的地区,使用卫星连接,保障远距离可靠 通信。 自主水面货船航行时,需要保证自身设备之 间通信顺畅,以及与岸基设备通信顺畅,多船之 间还要保证相互通信能够避免各种电磁干扰[59] , 保障通信可靠。此外,通信带宽、速率以及费用 等问题也需要进一步解决。 4.6 自主水面货船能效技术 自主水面货船应能够智能计算能耗分布,并 进行优化及性能评估。通过对船舶航行状态、耗 能状况的在线监测与数据的自动采集,对船舶能 效状况、航行及装载状态等进行评估,并通过大 数据分析、数值分析及优化技术,为船舶提供数 据评估和辅助决策,实现船舶能效实时监控、智 能评估及优化,不断提高船舶能效管理水平。航 线规划和航速优化是两种重要的航行决策形式, 直接影响到船舶燃油消耗和企业整体营运利润。 对单船来说,降低航速能够有效的降低船舶的能 GUIDANVE 路径 规划 位置点 生成 信息 NAVIGATION 环境感知 多信息融合 导航设备 雷达 摄像头 电罗经 …… …… 角加速度 执行机构 传感器 固态雷达 声音传 感器 其余传感设备 无人货船状态 CONTROL 船舶模型 自适应控制率 控制器分配 参 考 路 径 任务规划 1)任务;2)运行状态 3)环境干扰;4)能源 信息 图 5 自主水面货船航行脑系统构成 Fig. 5 Autonomous surface cargo ships navigating brain system composition 第 1 期 吴青,等:自主水面货船研究现状与展望 ·65·