正在加载图片...
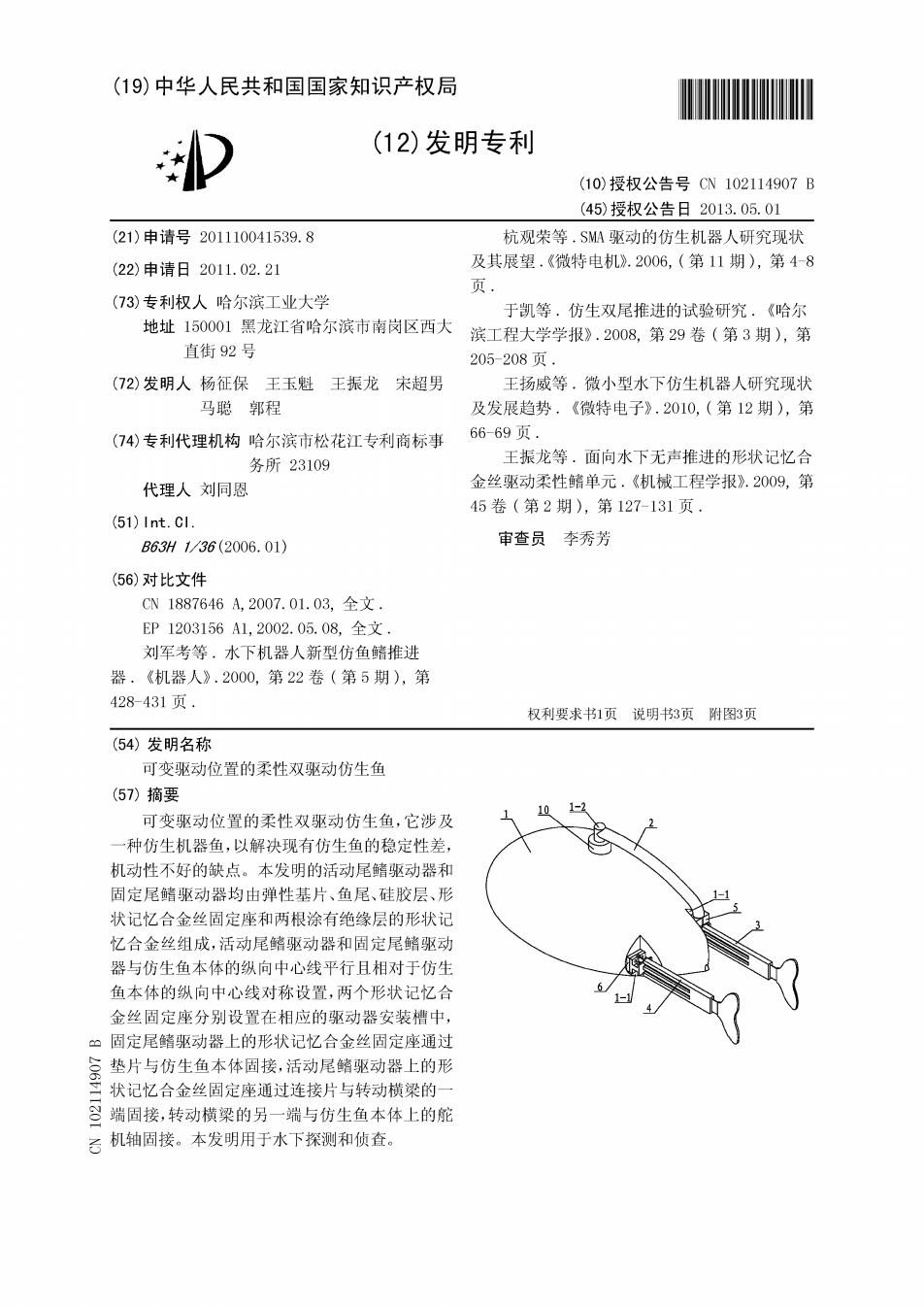
(19)中华人民共和国国家知识产权局 (12)发明专利 (10)授权公告号CN102114907B (45)授权公告日2013.05.01 (21)申请号201110041539.8 杭观荣等.SMA驱动的仿生机器人研究现状 (22)申请日2011.02.21 及其展望.《微特电机》.2006,(第11期),第48 页. (73)专利权人哈尔滨工业大学 于凯等.仿生双尾推进的试验研究,《哈尔 地址150001黑龙江省哈尔滨市南岗区西大 滨工程大学学报》.2008,第29卷(第3期),第 直街92号 205-208页. (72)发明人杨征保王玉魁王振龙宋超男 王扬威等,微小型水下仿生机器人研究现状 马聪郭程 及发展趋势.《微特电子》.2010,(第12期),第 (74)专利代理机构哈尔滨市松花江专利商标事 66-69页. 务所23109 王振龙等.面向水下无声推进的形状记忆合 代理人刘同恩 金丝驱动柔性鳍单元.《机械工程学报》.2009,第 45卷(第2期),第127-131页, (51)1nt.cl. B63H1/36(2006.01) 审查员李秀芳 (56)对比文件 CN1887646A,2007.01.03,全文. EP1203156A1,2002.05.08,全文, 刘军考等,水下机器人新型仿鱼鳍推进 器.《机器人》.2000第22卷(第5期),第 428-431页. 权利要求书1页说明书3页附图3页 (54)发明名称 可变驱动位置的柔性双驱动仿生鱼 (57)摘要 可变驱动位置的柔性双驱动仿生鱼,它涉及 一种仿生机器鱼,以解决现有仿生鱼的稳定性差, 机动性不好的缺点。本发明的活动尾鳍驱动器和 固定尾鳍驱动器均由弹性基片、鱼尾、硅胶层、形 状记忆合金丝固定座和两根涂有绝缘层的形状记 忆合金丝组成,活动尾鳍驱动器和固定尾鳍驱动 器与仿生鱼本体的纵向中心线平行且相对于仿生 鱼本体的纵向中心线对称设置,两个形状记忆合 金丝固定座分别设置在相应的驱动器安装槽中, 一固定尾鳍驱动器上的形状记忆合金丝固定座通过 体固接,活动尾 状记忆合金丝固定座通过连接片与转动横梁的一 三端固接,转动横梁的另一端与仿生鱼本体上的舵 子机轴固接。本发明用于水下探测和侦查