正在加载图片...
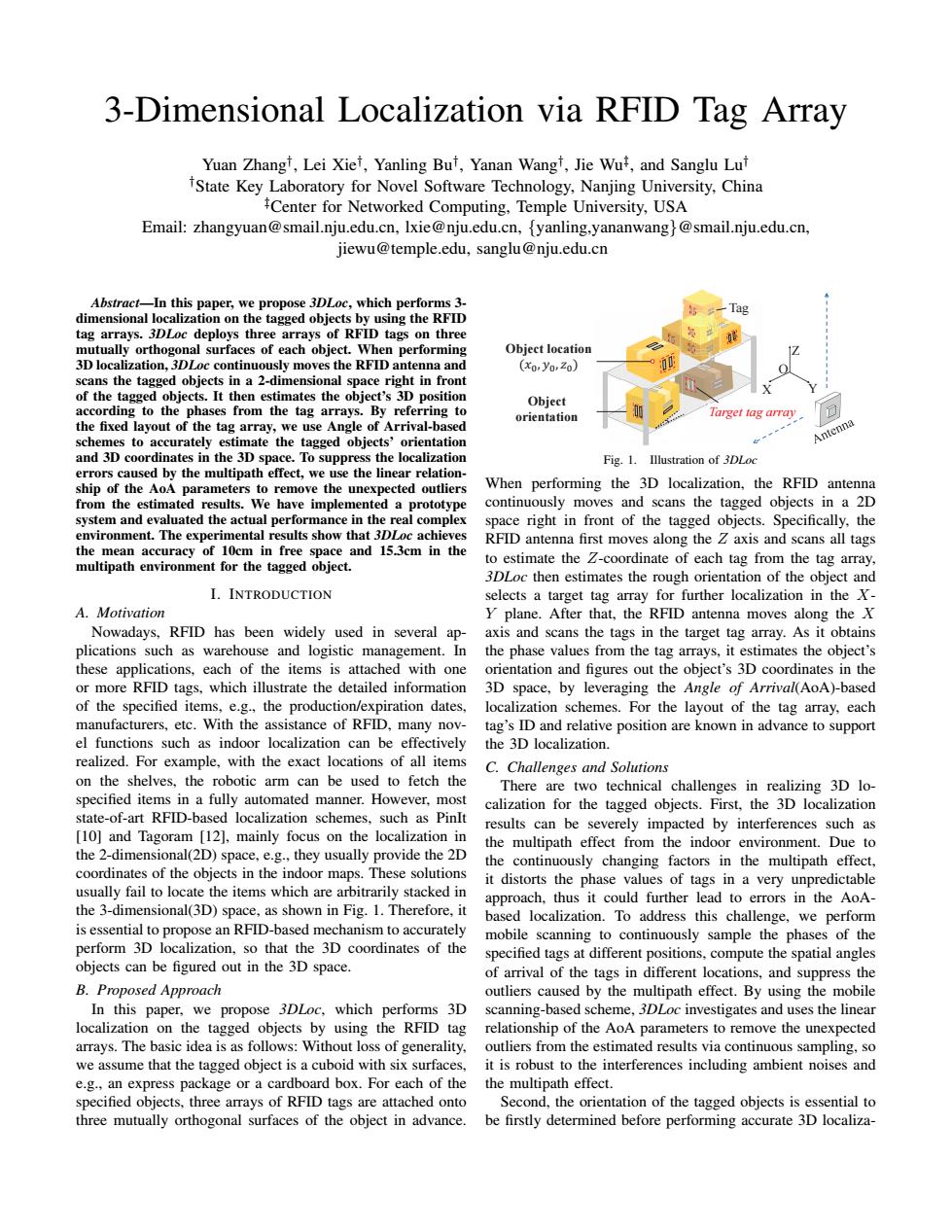
3-Dimensional Localization via RFID Tag Array Yuan Zhangt,Lei Xief,Yanling But,Yanan Wangt,Jie Wut,and Sanglu Lut iState Key Laboratory for Novel Software Technology,Nanjing University,China Center for Networked Computing,Temple University,USA Email:zhangyuan@smail.nju.edu.cn,Ixie@nju.edu.cn,{yanling.yananwang}@smail.nju.edu.cn, jiewu@temple.edu,sanglu @nju.edu.cn Abstract-In this paper,we propose 3DLoc,which performs 3- dimensional localization on the tagged objects by using the RFID tag arrays.3DLoc deploys three arrays of RFID tags on three mutually orthogonal surfaces of each object.When performing Object location 3D localization,3DLoc continuously moves the RFID antenna and (Xo.yo,Zo) scans the tagged objects in a 2-dimensional space right in front of the tagged objects.It then estimates the object's 3D position Object according to the phases from the tag arrays.By referring to orientation Target tag array the fixed layout of the tag array,we use Angle of Arrival-based schemes to accurately estimate the tagged objects'orientation Antenna and 3D coordinates in the 3D space.To suppress the localization Fig.1.Illustration of 3DLoc errors caused by the multipath effect,we use the linear relation- ship of the AoA parameters to remove the unexpected outliers When performing the 3D localization,the RFID antenna from the estimated results.We have implemented a prototype continuously moves and scans the tagged objects in a 2D system and evaluated the actual performance in the real complex space right in front of the tagged objects.Specifically,the environment.The experimental results show that 3DLoc achieves RFID antenna first moves along the 2 axis and scans all tags the mean accuracy of 10cm in free space and 15.3cm in the multipath environment for the tagged object. to estimate the Z-coordinate of each tag from the tag array, 3DLoc then estimates the rough orientation of the object and I.INTRODUCTION selects a target tag array for further localization in the x- A.Motivation Y plane.After that,the RFID antenna moves along the X Nowadays,RFID has been widely used in several ap- axis and scans the tags in the target tag array.As it obtains plications such as warehouse and logistic management.In the phase values from the tag arrays,it estimates the object's these applications,each of the items is attached with one orientation and figures out the object's 3D coordinates in the or more RFID tags,which illustrate the detailed information 3D space,by leveraging the Angle of Arrival(AoA)-based of the specified items,e.g.,the production/expiration dates, localization schemes.For the layout of the tag array,each manufacturers,etc.With the assistance of RFID,many nov-tag's ID and relative position are known in advance to support el functions such as indoor localization can be effectively the 3D localization. realized.For example,with the exact locations of all items C.Challenges and Solutions on the shelves.the robotic arm can be used to fetch the There are two technical challenges in realizing 3D lo- specified items in a fully automated manner.However,most calization for the tagged objects.First,the 3D localization state-of-art RFID-based localization schemes,such as PinIt results can be severely impacted by interferences such as [10]and Tagoram [12],mainly focus on the localization in the multipath effect from the indoor environment.Due to the 2-dimensional(2D)space,e.g.,they usually provide the 2D the continuously changing factors in the multipath effect, coordinates of the objects in the indoor maps.These solutions it distorts the phase values of tags in a very unpredictable usually fail to locate the items which are arbitrarily stacked in approach,thus it could further lead to errors in the AoA- the 3-dimensional(3D)space,as shown in Fig.1.Therefore,it based localization.To address this challenge,we perform is essential to propose an RFID-based mechanism to accurately mobile scanning to continuously sample the phases of the perform 3D localization,so that the 3D coordinates of the specified tags at different positions,compute the spatial angles objects can be figured out in the 3D space. of arrival of the tags in different locations,and suppress the B.Proposed Approach outliers caused by the multipath effect.By using the mobile In this paper,we propose 3DLoc,which performs 3D scanning-based scheme,3DLoc investigates and uses the linear localization on the tagged objects by using the RFID tag relationship of the AoA parameters to remove the unexpected arrays.The basic idea is as follows:Without loss of generality,outliers from the estimated results via continuous sampling,so we assume that the tagged object is a cuboid with six surfaces, it is robust to the interferences including ambient noises and e.g.,an express package or a cardboard box.For each of the the multipath effect. specified objects,three arrays of RFID tags are attached onto Second,the orientation of the tagged objects is essential to three mutually orthogonal surfaces of the object in advance. be firstly determined before performing accurate 3D localiza-3-Dimensional Localization via RFID Tag Array Yuan Zhang† , Lei Xie† , Yanling Bu† , Yanan Wang† , Jie Wu‡ , and Sanglu Lu† †State Key Laboratory for Novel Software Technology, Nanjing University, China ‡Center for Networked Computing, Temple University, USA Email: zhangyuan@smail.nju.edu.cn, lxie@nju.edu.cn, {yanling,yananwang}@smail.nju.edu.cn, jiewu@temple.edu, sanglu@nju.edu.cn Abstract—In this paper, we propose 3DLoc, which performs 3- dimensional localization on the tagged objects by using the RFID tag arrays. 3DLoc deploys three arrays of RFID tags on three mutually orthogonal surfaces of each object. When performing 3D localization, 3DLoc continuously moves the RFID antenna and scans the tagged objects in a 2-dimensional space right in front of the tagged objects. It then estimates the object’s 3D position according to the phases from the tag arrays. By referring to the fixed layout of the tag array, we use Angle of Arrival-based schemes to accurately estimate the tagged objects’ orientation and 3D coordinates in the 3D space. To suppress the localization errors caused by the multipath effect, we use the linear relationship of the AoA parameters to remove the unexpected outliers from the estimated results. We have implemented a prototype system and evaluated the actual performance in the real complex environment. The experimental results show that 3DLoc achieves the mean accuracy of 10cm in free space and 15.3cm in the multipath environment for the tagged object. I. INTRODUCTION A. Motivation Nowadays, RFID has been widely used in several applications such as warehouse and logistic management. In these applications, each of the items is attached with one or more RFID tags, which illustrate the detailed information of the specified items, e.g., the production/expiration dates, manufacturers, etc. With the assistance of RFID, many novel functions such as indoor localization can be effectively realized. For example, with the exact locations of all items on the shelves, the robotic arm can be used to fetch the specified items in a fully automated manner. However, most state-of-art RFID-based localization schemes, such as PinIt [10] and Tagoram [12], mainly focus on the localization in the 2-dimensional(2D) space, e.g., they usually provide the 2D coordinates of the objects in the indoor maps. These solutions usually fail to locate the items which are arbitrarily stacked in the 3-dimensional(3D) space, as shown in Fig. 1. Therefore, it is essential to propose an RFID-based mechanism to accurately perform 3D localization, so that the 3D coordinates of the objects can be figured out in the 3D space. B. Proposed Approach In this paper, we propose 3DLoc, which performs 3D localization on the tagged objects by using the RFID tag arrays. The basic idea is as follows: Without loss of generality, we assume that the tagged object is a cuboid with six surfaces, e.g., an express package or a cardboard box. For each of the specified objects, three arrays of RFID tags are attached onto three mutually orthogonal surfaces of the object in advance. X Y Object location Z ሺݔǡ ݕǡ ݖሻ Target tag array Object orientation Tag O Fig. 1. Illustration of 3DLoc When performing the 3D localization, the RFID antenna continuously moves and scans the tagged objects in a 2D space right in front of the tagged objects. Specifically, the RFID antenna first moves along the Z axis and scans all tags to estimate the Z-coordinate of each tag from the tag array, 3DLoc then estimates the rough orientation of the object and selects a target tag array for further localization in the XY plane. After that, the RFID antenna moves along the X axis and scans the tags in the target tag array. As it obtains the phase values from the tag arrays, it estimates the object’s orientation and figures out the object’s 3D coordinates in the 3D space, by leveraging the Angle of Arrival(AoA)-based localization schemes. For the layout of the tag array, each tag’s ID and relative position are known in advance to support the 3D localization. C. Challenges and Solutions There are two technical challenges in realizing 3D localization for the tagged objects. First, the 3D localization results can be severely impacted by interferences such as the multipath effect from the indoor environment. Due to the continuously changing factors in the multipath effect, it distorts the phase values of tags in a very unpredictable approach, thus it could further lead to errors in the AoAbased localization. To address this challenge, we perform mobile scanning to continuously sample the phases of the specified tags at different positions, compute the spatial angles of arrival of the tags in different locations, and suppress the outliers caused by the multipath effect. By using the mobile scanning-based scheme, 3DLoc investigates and uses the linear relationship of the AoA parameters to remove the unexpected outliers from the estimated results via continuous sampling, so it is robust to the interferences including ambient noises and the multipath effect. Second, the orientation of the tagged objects is essential to be firstly determined before performing accurate 3D localiza-