正在加载图片...
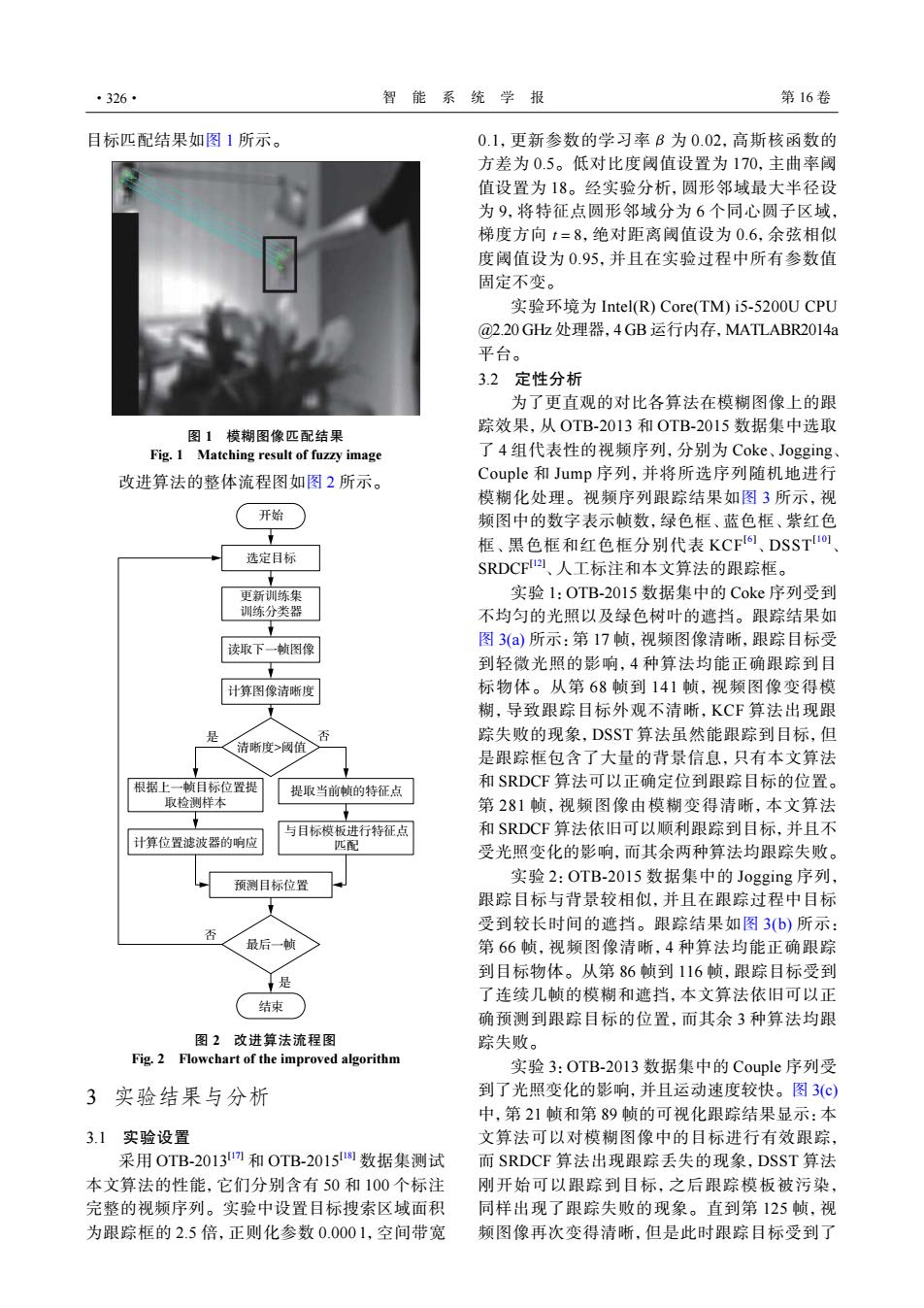
·326· 智能系统学报 第16卷 目标匹配结果如图1所示。 0.1,更新参数的学习率B为0.02,高斯核函数的 方差为0.5。低对比度阈值设置为170,主曲率阈 值设置为18。经实验分析,圆形邻域最大半径设 为9,将特征点圆形邻域分为6个同心圆子区域, 梯度方向t=8,绝对距离阈值设为0.6,余弦相似 度阈值设为0.95,并且在实验过程中所有参数值 固定不变。 实验环境为Intel(R)Core(TMi5-520 OU CPU @2.20GH处理器,4GB运行内存,MATLABR2014a 平台。 3.2定性分析 为了更直观的对比各算法在模糊图像上的跟 踪效果,从OTB-2013和OTB-2015数据集中选取 图1模糊图像匹配结果 Fig.1 Matching result of fuzzy image 了4组代表性的视频序列,分别为Coke、Jogging、 改进算法的整体流程图如图2所示。 Couple和Jump序列,并将所选序列随机地进行 模糊化处理。视频序列跟踪结果如图3所示,视 开始 频图中的数字表示帧数,绿色框、蓝色框、紫红色 框、黑色框和红色框分别代表KCF、DSSTUO 选定目标 SRDCEU2、人工标注和本文算法的跟踪框。 更新训练集 实验1:OTB-2015数据集中的Coke序列受到 训练分类器 不均匀的光照以及绿色树叶的遮挡。跟踪结果如 读取下一桢帧图像 图3(a)所示:第17帧,视频图像清晰,跟踪目标受 到轻微光照的影响,4种算法均能正确跟踪到目 计算图像清晰度 标物体。从第68帧到141帧,视频图像变得模 糊,导致跟踪目标外观不清晰,KCF算法出现跟 否 踪失败的现象,DSST算法虽然能跟踪到目标,但 、清晰度>闯值 是跟踪框包含了大量的背景信息,只有本文算法 t 根据上一帧目标位置提 和SRDCF算法可以正确定位到跟踪目标的位置。 提取当前帧的特征点 取检测样本 第281帧,视频图像由模糊变得清晰,本文算法 与目标模板进行特征点 和SRDCF算法依旧可以顺利跟踪到目标,并且不 计算位置滤波器的响应 匹配 受光照变化的影响,而其余两种算法均跟踪失败。 预测目标位置 实验2:0TB-2015数据集中的Jogging序列, 跟踪目标与背景较相似,并且在跟踪过程中目标 受到较长时间的遮挡。跟踪结果如图3(b)所示: 否 最后一帧 第66帧,视频图像清晰,4种算法均能正确跟踪 到目标物体。从第86帧到116帧,跟踪目标受到 是 了连续几帧的模糊和遮挡,本文算法依旧可以正 结束 确预测到跟踪目标的位置,而其余3种算法均跟 图2改进算法流程图 踪失败。 Fig.2 Flowchart of the improved algorithm 实验3:OTB-2013数据集中的Couple序列受 3实验结果与分析 到了光照变化的影响,并且运动速度较快。图3(c) 中,第21帧和第89帧的可视化跟踪结果显示:本 3.1实验设置 文算法可以对模糊图像中的目标进行有效跟踪, 采用0TB-2013m和0TB-2015数据集测试 而SRDCF算法出现跟踪丢失的现象,DSST算法 本文算法的性能,它们分别含有50和100个标注 刚开始可以跟踪到目标,之后跟踪模板被污染, 完整的视频序列。实验中设置目标搜索区域面积 同样出现了跟踪失败的现象。直到第125帧,视 为跟踪框的2.5倍,正则化参数0.0001,空间带宽 频图像再次变得清晰,但是此时跟踪目标受到了目标匹配结果如图 1 所示。 图 1 模糊图像匹配结果 Fig. 1 Matching result of fuzzy image 改进算法的整体流程图如图 2 所示。 开始 选定目标 读取下一帧图像 清晰度>阈值 根据上一帧目标位置提 取检测样本 计算位置滤波器的响应 提取当前帧的特征点 与目标模板进行特征点 匹配 预测目标位置 结束 是 否 更新训练集 训练分类器 计算图像清晰度 最后一帧 否 是 图 2 改进算法流程图 Fig. 2 Flowchart of the improved algorithm 3 实验结果与分析 3.1 实验设置 采用 OTB-2013[17] 和 OTB-2015[18] 数据集测试 本文算法的性能,它们分别含有 50 和 100 个标注 完整的视频序列。实验中设置目标搜索区域面积 为跟踪框的 2.5 倍,正则化参数 0.000 1,空间带宽 β t = 8 0.1,更新参数的学习率 为 0.02,高斯核函数的 方差为 0.5。低对比度阈值设置为 170,主曲率阈 值设置为 18。经实验分析,圆形邻域最大半径设 为 9,将特征点圆形邻域分为 6 个同心圆子区域, 梯度方向 ,绝对距离阈值设为 0.6,余弦相似 度阈值设为 0.95,并且在实验过程中所有参数值 固定不变。 实验环境为 Intel(R) Core(TM) i5-5200U CPU @2.20 GHz 处理器,4 GB 运行内存,MATLABR2014a 平台。 3.2 定性分析 为了更直观的对比各算法在模糊图像上的跟 踪效果,从 OTB-2013 和 OTB-2015 数据集中选取 了 4 组代表性的视频序列,分别为 Coke、Jogging、 Couple 和 Jump 序列,并将所选序列随机地进行 模糊化处理。视频序列跟踪结果如图 3 所示,视 频图中的数字表示帧数,绿色框、蓝色框、紫红色 框、黑色框和红色框分别代表 KCF[6] 、DSST[10] 、 SRDCF[12] 、人工标注和本文算法的跟踪框。 实验 1:OTB-2015 数据集中的 Coke 序列受到 不均匀的光照以及绿色树叶的遮挡。跟踪结果如 图 3(a) 所示:第 17 帧,视频图像清晰,跟踪目标受 到轻微光照的影响,4 种算法均能正确跟踪到目 标物体。从第 68 帧到 141 帧,视频图像变得模 糊,导致跟踪目标外观不清晰,KCF 算法出现跟 踪失败的现象,DSST 算法虽然能跟踪到目标,但 是跟踪框包含了大量的背景信息,只有本文算法 和 SRDCF 算法可以正确定位到跟踪目标的位置。 第 281 帧,视频图像由模糊变得清晰,本文算法 和 SRDCF 算法依旧可以顺利跟踪到目标,并且不 受光照变化的影响,而其余两种算法均跟踪失败。 实验 2:OTB-2015 数据集中的 Jogging 序列, 跟踪目标与背景较相似,并且在跟踪过程中目标 受到较长时间的遮挡。跟踪结果如图 3(b) 所示: 第 66 帧,视频图像清晰,4 种算法均能正确跟踪 到目标物体。从第 86 帧到 116 帧,跟踪目标受到 了连续几帧的模糊和遮挡,本文算法依旧可以正 确预测到跟踪目标的位置,而其余 3 种算法均跟 踪失败。 实验 3:OTB-2013 数据集中的 Couple 序列受 到了光照变化的影响,并且运动速度较快。图 3(c) 中,第 21 帧和第 89 帧的可视化跟踪结果显示:本 文算法可以对模糊图像中的目标进行有效跟踪, 而 SRDCF 算法出现跟踪丢失的现象,DSST 算法 刚开始可以跟踪到目标,之后跟踪模板被污染, 同样出现了跟踪失败的现象。直到第 125 帧,视 频图像再次变得清晰,但是此时跟踪目标受到了 ·326· 智 能 系 统 学 报 第 16 卷