正在加载图片...
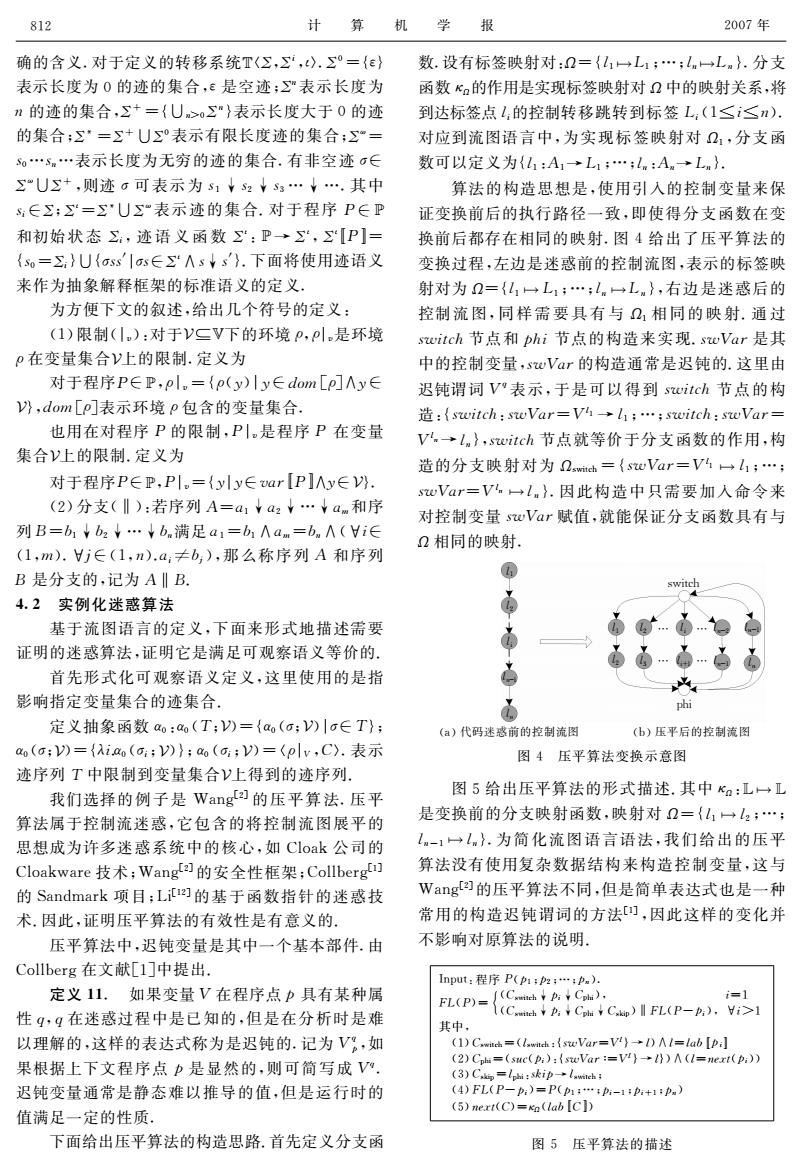
812 计算 机学报 2007年 确的含义.对于定义的转移系统T(∑,,).={e} 数.设有标签映射对:2={l1→L1;…;l一Lm.分支 表示长度为0的迹的集合,e是空迹;表示长度为 函数:的作用是实现标签映射对2中的映射关系,将 n的迹的集合,Σ+={U>o}表示长度大于0的迹 到达标签点l,的控制转移跳转到标签L:(1≤≤n). 的集合;Σ·=Σ+UΣ表示有限长度迹的集合;= 对应到流图语言中,为实现标签映射对21,分支函 s…s。…表示长度为无穷的迹的集合.有非空迹σ∈ 数可以定义为{l1:A1→L1:…;ln:An→Ln}. UΣ+,则迹o可表示为s1s2¥s3…¥…,其中 算法的构造思想是,使用引入的控制变量来保 s∈∑;=ΣUΣ"表示迹的集合.对于程序P∈P 证变换前后的执行路径一致,即使得分支函数在变 和初始状态,迹语义函数:P→,[P]= 换前后都存在相同的映射.图4给出了压平算法的 {so=}U{oss'|s∈ΣAs¥s〉.下面将使用迹语义 变换过程,左边是迷惑前的控制流图,表示的标签映 来作为抽象解释框架的标准语义的定义, 射对为2={l1一L1;…;ln→Ln},右边是迷惑后的 为方便下文的叙述,给出几个符号的定义: 控制流图,同样需要具有与21相同的映射.通过 (1)限制(|.):对于V二V下的环境p,l.是环境 switch节点和phi节点的构造来实现.sVar是其 p在变量集合y上的限制.定义为 中的控制变量,sVar的构造通常是迟钝的.这里由 对于程序P∈P,pl。={p(y)ly∈dom[p]Ay∈ 迟钝谓词V"表示,于是可以得到switch节点的构 ,dom[p]表示环境p包含的变量集合 造:{switch:swVar=Vh→l1;…;switch:swVar= 也用在对程序P的限制,P|。是程序P在变量 V八.→ln},switch节点就等价于分支函数的作用,构 集合V上的限制.定义为 造的分支映射对为2mih={swVar=V乃→l1;…; 对于程序P∈P,P|={yly∈ar【PAy∈. sVar=V.一→lm}.因此构造中只需要加入命令来 (2)分支(‖):若序列A=a1¥a2¥…¥am和序 对控制变量swVar赋值,就能保证分支函数具有与 列B=b1¥b2¥…↓b.满足a1=b1八am=bn八(i∈ 2相同的映射. (1,m).Hj∈(1,n).a:≠b),那么称序列A和序列 B是分支的,记为A‖B. G switch 4.2实例化迷惑算法 基于流图语言的定义,下面来形式地描述需要 证明的迷惑算法,证明它是满足可观察语义等价的. 首先形式化可观察语义定义,这里使用的是指 影响指定变量集合的迹集合。 phi 定义抽象函数ao:a(T;)={a(o;)|o∈T}; (a)代码迷惑前的控制流图 (b)压平后的控制流图 a(o;)={入iao(o:;V)};ao(o;V)=〈pv,C).表示 图4压平算法变换示意图 迹序列T中限制到变量集合V上得到的迹序列. 我们选择的例子是Wang的压平算法.压平 图5给出压平算法的形式描述.其中:L一L 算法属于控制流迷惑,它包含的将控制流图展平的 是变换前的分支映射函数,映射对2={l1→2;…: 思想成为许多迷惑系统中的核心,如Cloak公司的 lm-1→l..为简化流图语言语法,我们给出的压平 Cloakware技术;Wang的安全性框架;Collbergf 算法没有使用复杂数据结构来构造控制变量,这与 的Sandmark项目:Li町的基于函数指针的迷惑技 Wang的压平算法不同,但是简单表达式也是一种 术.因此,证明压平算法的有效性是有意义的 常用的构造迟钝谓词的方法[),因此这样的变化并 压平算法中,迟钝变量是其中一个基本部件.由 不影响对原算法的说明。 Collberg在文献[1]中提出. nput:程序P(p1:p2…:pa) 定义11.如果变量V在程序点p具有某种属 FL(P)=((C.mdCp). =1 性q,q在迷惑过程中是已知的,但是在分析时是难 (C.mitp Cpli Caap)ll FL(P-P:),Vi>1 其中, 以理解的,这样的表达式称为是迟钝的.记为V%,如 (1)C.wich (lawi :swVar=V)D)Al=lab [pi] 果根据上下文程序点p是显然的,则可简写成V. (2)Cpl=(suc(p:)(swVar :=VI))A(I=next(p:)) (3)C与=lhi:kip→lweh; 迟钝变量通常是静态难以推导的值,但是运行时的 (4)FL(P-p:)=P(p1…:p:-1p:+1:p) (5)next(C)=kn(lab [C]) 值满足一定的性质. 下面给出压平算法的构造思路.首先定义分支函 图5压平算法的描述确的含义.对于定义的转移系统%〈Σ,Σ犻,ι〉.Σ0={ε} 表示长度为0的迹的集合,ε是空迹;Σ狀 表示长度为 狀 的迹的集合,Σ+ ={∪狀>0Σ狀}表示长度大于0的迹 的集合;Σ =Σ+ ∪Σ0表示有限长度迹的集合;Σω = 狊0…狊狀…表示长度为无穷的迹的集合.有非空迹σ∈ Σω ∪Σ+ ,则迹σ可表示为狊1 ↓狊2 ↓狊3 …↓….其中 狊犻∈Σ;Σι=Σ∪Σω 表示迹的集合.对于程序 犘∈# 和初始状 态 Σ犻,迹 语 义 函 数 Σι:# →Σι,Σι!犘"= {狊0=Σ犻}∪{σ狊狊′|σ狊∈Σι∧狊↓狊′}.下面将使用迹语义 来作为抽象解释框架的标准语义的定义. 为方便下文的叙述,给出几个符号的定义: (1)限制(|狏):对于' *下的环境ρ,ρ|狏是环境 ρ在变量集合'上的限制.定义为 对于程序犘∈#,ρ|狏 ={ρ(狔)|狔∈犱狅犿[ρ]∧狔∈ '},犱狅犿[ρ]表示环境ρ包含的变量集合. 也用在对程序犘 的限制,犘|狏是程序犘 在变量 集合'上的限制.定义为 对于程序犘∈#,犘|狏={狔|狔∈狏犪狉!犘" ∧狔∈'}. (2)分支(‖):若序列犃=犪1↓犪2↓…↓犪犿和序 列犅=犫1↓犫2↓…↓犫狀满足犪1=犫1∧犪犿 =犫狀∧(犻∈ (1,犿).犼∈(1,狀).犪犻≠犫犼),那么称序列 犃 和序列 犅 是分支的,记为犃‖犅. 42 实例化迷惑算法 基于流图语言的定义,下面来形式地描述需要 证明的迷惑算法,证明它是满足可观察语义等价的. 首先形式化可观察语义定义,这里使用的是指 影响指定变量集合的迹集合. 定义抽象函数α0:α0(犜;')={α0(σ;')|σ∈犜}; α0(σ;')={λ犻α.0(σ犻;')};α0(σ犻;')=〈ρ|犞 ,犆〉.表示 迹序列犜 中限制到变量集合'上得到的迹序列. 我们选择的例子是 Wang[2]的压平算法.压平 算法属于控制流迷惑,它包含的将控制流图展平的 思想成为许多迷惑系统中的核心,如 Cloak公司的 Cloakware技术;Wang[2]的安全性框架;Collberg[1] 的Sandmark项目;Li[12]的基于函数指针的迷惑技 术.因此,证明压平算法的有效性是有意义的. 压平算法中,迟钝变量是其中一个基本部件.由 Collberg在文献[1]中提出. 定义11. 如果变量犞 在程序点狆 具有某种属 性狇,狇在迷惑过程中是已知的,但是在分析时是难 以理解的,这样的表达式称为是迟钝的.记为犞狇 狆,如 果根据上下文程序点狆 是显然的,则可简写成犞狇 . 迟钝变量通常是静态难以推导的值,但是运行时的 值满足一定的性质. 下面给出压平算法的构造思路.首先定义分支函 数.设有标签映射对:Ω={犾1#犔1;…;犾狀#犔狀}.分支 函数κΩ的作用是实现标签映射对Ω中的映射关系,将 到达标签点犾犻的控制转移跳转到标签犔犻(1犻狀). 对应到流图语言中,为实现标签映射对 Ω1,分支函 数可以定义为{犾1:犃1→犔1;…;犾狀:犃狀→犔狀}. 算法的构造思想是,使用引入的控制变量来保 证变换前后的执行路径一致,即使得分支函数在变 换前后都存在相同的映射.图4给出了压平算法的 变换过程,左边是迷惑前的控制流图,表示的标签映 射对为Ω={犾1 #犔1;…;犾狀 #犔狀},右边是迷惑后的 控制流 图,同 样 需 要 具 有 与 Ω1 相 同 的 映 射.通 过 狊狑犻狋犮犺节点和狆犺犻节点的构造来实现.狊狑犞犪狉是其 中的控制变量,狊狑犞犪狉的构造通常是迟钝的.这里由 迟钝谓词犞狇 表示,于是可以得到狊狑犻狋犮犺 节点的构 造:{狊狑犻狋犮犺:狊狑犞犪狉=犞犾1 →犾1;…;狊狑犻狋犮犺:狊狑犞犪狉= 犞犾狀 →犾狀},狊狑犻狋犮犺节点就等价于分支函数的作用,构 造的分支映射对为 Ωswitch={狊狑犞犪狉=犞犾1 #犾1;…; 狊狑犞犪狉=犞犾狀 #犾狀}.因此构造中只需要加入命令来 对控制变量狊狑犞犪狉赋值,就能保证分支函数具有与 Ω 相同的映射. !! !" !" !##! !# $%&'() *)& !! !" !" !#$" ! ! !#$! !" !+ ! !"%& ! !#$! !# ,-. 代码迷惑前的控制流图 ,0. 压平后的控制流图 图 4 压平算法变换示意图 图5给出压平算法的形式描述.其中κΩ:" # " 是变换前的分支映射函数,映射对Ω={犾1 #犾2;…; 犾狀-1 #犾狀}.为简化流图语言语法,我们给出的压平 算法没有使用复杂数据结构来构造控制变量,这与 Wang[2]的压平算法不同,但是简单表达式也是一种 常用的构造迟钝谓词的方法[1],因此这样的变化并 不影响对原算法的说明. Input:程序犘(狆1;狆2;…;狆狀). 犉犔(犘)= (犆switch↓狆犻↓犆phi), 犻=1 {(犆switch↓狆犻↓犆phi↓犆skip)‖犉犔(犘-狆犻),犻>1 其中, (1)犆switch=(犾switch:{狊狑犞犪狉=犞犾}→犾)∧犾=犾犪犫!狆犻" (2)犆phi=(狊狌犮(狆犻):{狊狑犞犪狉··=犞犾}→犾})∧(犾=狀犲狓狋(狆犻)) (3)犆skip=犾phi:狊犽犻狆→犾switch; (4)犉犔(犘-狆犻)=犘(狆1;…;狆犻-1;狆犻+1;狆狀) (5)狀犲狓狋(犆)=κΩ(犾犪犫!犆") 图 5 压平算法的描述 812 计 算 机 学 报 2007年