正在加载图片...
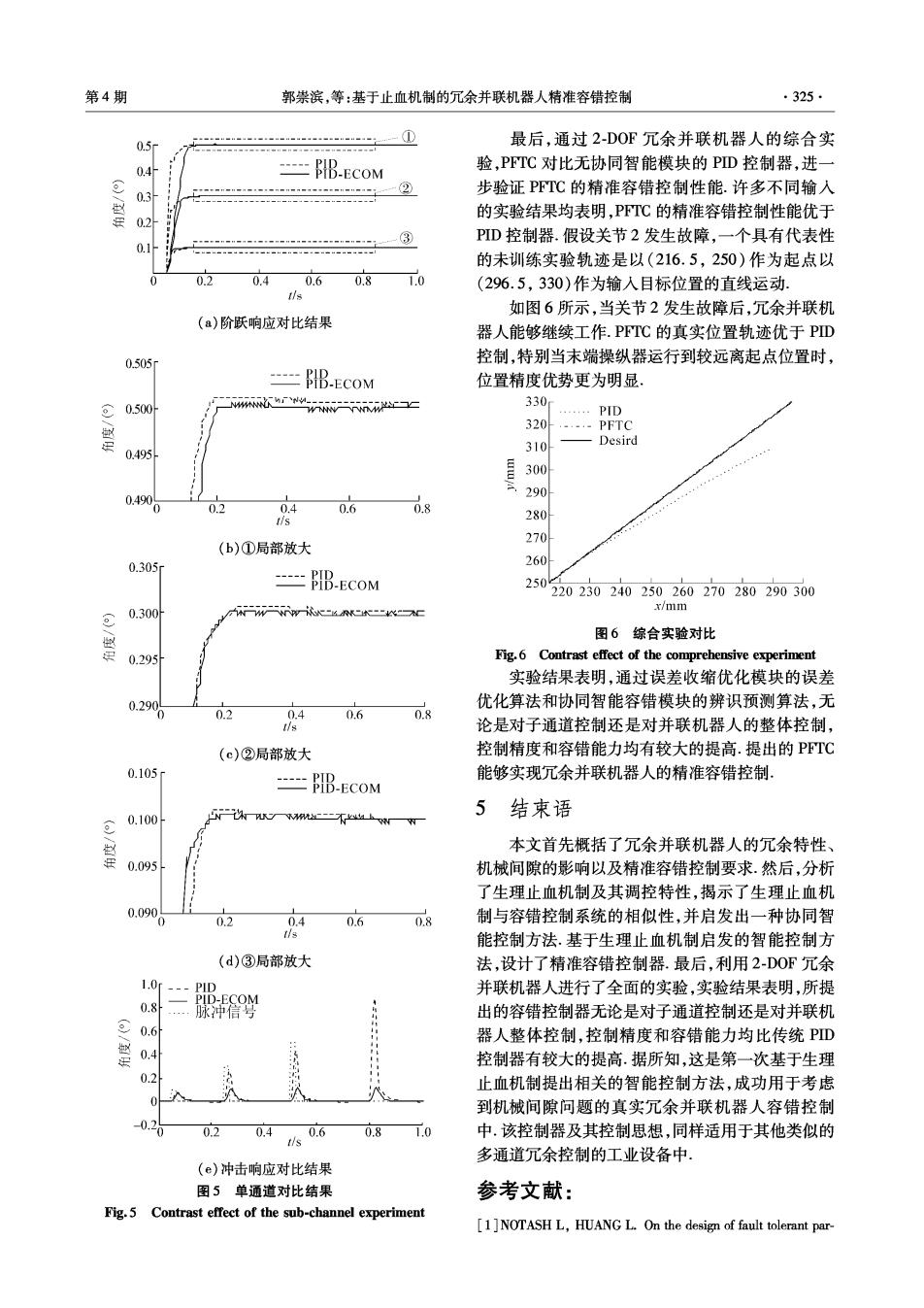
第4期 郭崇滨,等:基于止血机制的冗余并联机器人精准容错控制 325· 0.5m a 最后,通过2-DOF冗余并联机器人的综合实 PB.ECOM 验,PTC对比无协同智能模块的PD控制器,进一 3 步验证P℉TC的精准容错控制性能.许多不同输入 的实验结果均表明,P℉TC的精准容错控制性能优于 ③ PD控制器.假设关节2发生故障,一个具有代表性 0. 的未训练实验轨迹是以(216.5,250)作为起点以 0.2 0.4 0.6 0.8 1.0 (296.5,330)作为输入目标位置的直线运动. tis 如图6所示,当关节2发生故障后,冗余并联机 (a)阶跃响应对比结果 器人能够继续工作.PTC的真实位置轨迹优于PD 0.505 控制,特别当末端操纵器运行到较远离起点位置时, --BIB.ECOM 位置精度优势更为明显. 0.500 330 .PID 320.-..-PFTC Desird 0.495 310 300 0.490 三290 0 0.2 .4 0.6 0.8 tis 280 (b)①局部放大 270 0.305r 260 PIB.ECOM 250 220230240250260270280290300 0.300 x/mm 型 图6综合实验对比 0.295 Fig.6 Contrast effect of the comprehensive experiment 实验结果表明,通过误差收缩优化模块的误差 0.290 优化算法和协同智能容错模块的辨识预测算法,无 0 0.2 0.4 0.6 0.8 论是对子通道控制还是对并联机器人的整体控制, (c)②局部放大 控制精度和容错能力均有较大的提高.提出的PTC 0.105 -PIB-ECOM 能够实现冗余并联机器人的精准容错控制。 5结束语 0.100 不 本文首先概括了冗余并联机器人的冗余特性、 0.095 机械间隙的影响以及精准容错控制要求.然后,分析 了生理止血机制及其调控特性,揭示了生理止血机 0.090 0.2 0.4 0.6 0.8 制与容错控制系统的相似性,并启发出一种协同智 能控制方法.基于生理止血机制启发的智能控制方 (d)③局部放大 法,设计了精准容错控制器.最后,利用2-D0F冗余 1.0 --PID 并联机器人进行了全面的实验,实验结果表明,所提 PID-ECOM 0.8 脉冲信号 出的容错控制器无论是对子通道控制还是对并联机 0.6 器人整体控制,控制精度和容错能力均比传统PD 0.4 控制器有较大的提高.据所知,这是第一次基于生理 0.2 止血机制提出相关的智能控制方法,成功用于考虑 到机械间隙问题的真实冗余并联机器人容错控制 0.2 0.2 0.4 0.6 0.8 1.0 中.该控制器及其控制思想,同样适用于其他类似的 多通道冗余控制的工业设备中. (e)冲击响应对比结果 图5单通道对比结果 参考文献: Fig.5 Contrast effect of the sub-channel experiment [1]NOTASH L,HUANG L.On the design of fault tolerant par-