正在加载图片...
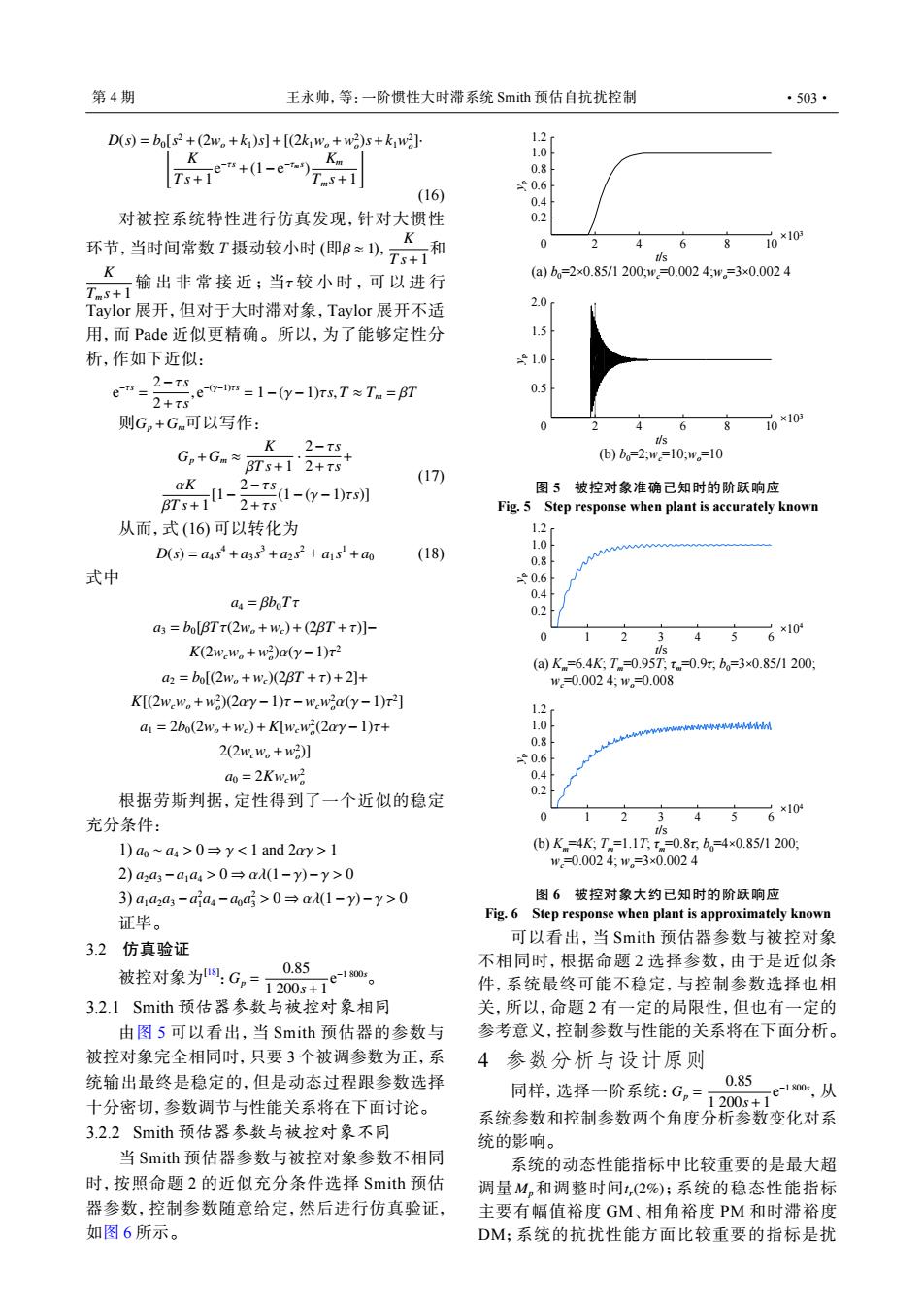
第4期 王永帅,等:一阶惯性大时滞系统Smith预估自抗扰控制 ·503· D)=bls2+(2w。+k1)s+[(2k1w。+w2)s+k1w2] 1.2r 1.0 0.8 40.6 (16) 0.4 对被控系统特性进行仿真发现,针对大惯性 0.2 环节,当时间密数了摄动较小时(御8=小7和 0 4 6 80×10 +输出非常接近:当较小时,可以进行 (a)b=2×0.85/1200,w=0.0024;w。=3×0.0024 Taylor展开,但对于大时滞对象,Taylor展开不适 2.0 用,而Pade近似更精确。所以,为了能够定性分 1.5 析,作如下近似: .0 eus2-rs e-1=1-(y-1)r3,T≈Tm=βT 0.5 2+Ts 则Gp+Gm可以写作: 4 。680×10 K 2-TS Gp+Gm≈ BTs+1 2+Ts (b)b。=2:w=10:w。=10 l--g-r训 aK (17) 图5被控对象准确已知时的阶跃响应 Fig.5 Step response when plant is accurately known 从而,式(16)可以转化为 1.2 D(s)=aas+ass+azs+ais'+ao 1.0 (18) 0.8 式中 40.6 a=BboTr 0.4 0.2 a3=bo[BTT(2w。+we)+(2BT+T】- 0 1 3 4 56×10 K(2w-w。+w2)ar(y-1)r2 (a)K.=6.4K,T=0.95T,tm=0.9x,b=3x0.85/1200; a2=bo[(2wo+we)(2BT+)+2]+ w=0.0024;w。=0.008 K(2w.w。+w2)2ay-1)r-ww2a(y-1)r2] 1.2 a1 2b0(2wo+we)+K[wew(2ay-1)T+ 1.0 wwwwwwwninmwruimiiin 0.8 2(2ww。+w] 0.6 ao=2Kwew 0.4 0.2 根据劳斯判据,定性得到了一个近似的稳定 0 充分条件: 123456×10 1)ao~aa>0=y<1 and 2ay>1 (b)K=4KTm=1.1T,tm=0.8x,b。=4×0.851200 w=0.0024,1w.=3×0.0024 2)a2a3-a1a4>0→ad(1-y)-y>0 3)a1a2a3-aia4-a>0→ad1-y)-y>0 图6被控对象大约已知时的阶跃响应 证毕。 Fig.6 Step response when plant is approximately known 可以看出,当Smith预估器参数与被控对象 3.2仿真验证 0.85 不相同时,根据命题2选择参数,由于是近似条 被控对象为,G,=12003+1m。 件,系统最终可能不稳定,与控制参数选择也相 3.2.1 Smith预估器参数与被控对象相同 关,所以,命题2有一定的局限性,但也有一定的 由图5可以看出,当Smith预估器的参数与 参考意义,控制参数与性能的关系将在下面分析。 被控对象完全相同时,只要3个被调参数为正,系 4参数分析与设计原则 统输出最终是稳定的,但是动态过程跟参数选择 0.85 十分密切,参数调节与性能关系将在下面讨论。 同样,选择一阶系统:G,=200m,从 系统参数和控制参数两个角度分析参数变化对系 3.2.2 Smith预估器参数与被控对象不同 统的影响。 当Smith预估器参数与被控对象参数不相同 系统的动态性能指标中比较重要的是最大超 时,按照命题2的近似充分条件选择Smith预估 调量M和调整时间1,(2%);系统的稳态性能指标 器参数,控制参数随意给定,然后进行仿真验证, 主要有幅值裕度GM、相角裕度PM和时滞裕度 如图6所示。 DM;系统的抗扰性能方面比较重要的指标是扰D(s) = b0[s 2 +(2wo +k1)s]+[(2k1wo +w 2 o )s+k1w 2 o ]· [ K T s+1 e −τs +(1−e −τm s ) Km Tm s+1 ] (16) β ≈ 1 K T s+1 K Tm s+1 τ 对被控系统特性进行仿真发现,针对大惯性 环节,当时间常数 T 摄动较小时 (即 ), 和 输出非常接近;当 较小时,可以进 行 Taylor 展开,但对于大时滞对象,Taylor 展开不适 用,而 Pade 近似更精确。所以,为了能够定性分 析,作如下近似: e −τs = 2−τs 2+τs , e −(γ−1)τs = 1−(γ−1)τs,T ≈ Tm = βT 则 Gp +Gm可以写作: Gp +Gm ≈ K βT s+1 · 2−τs 2+τs + αK βT s+1 [1− 2−τs 2+τs (1−(γ−1)τs)] (17) 从而,式 (16) 可以转化为 D(s) = a4 s 4 +a3 s 3 +a2 s 2 + a1 s 1 +a0 (18) 式中 a4 = βb0Tτ a3 = b0[βTτ(2wo +wc)+(2βT +τ)]− K(2wcwo +w 2 o )α(γ−1)τ 2 a2 = b0[(2wo +wc)(2βT +τ)+2]+ K[(2wcwo +w 2 o )(2αγ−1)τ−wcw 2 oα(γ−1)τ 2 ] a1 = 2b0(2wo +wc)+K[wcw 2 o (2αγ−1)τ+ 2(2wcwo +w 2 o )] a0 = 2Kwcw 2 o 根据劳斯判据,定性得到了一个近似的稳定 充分条件: 1) a0 ∼ a4 > 0 ⇒ γ < 1 and 2αγ > 1 2) a2a3 −a1a4 > 0 ⇒ αλ(1−γ)−γ > 0 a1a2a3 −a 2 1 a4 −a0a 2 3) 3 > 0 ⇒ αλ(1−γ)−γ > 0 证毕。 3.2 仿真验证 Gp = 0.85 1 200s+1 e 被控对象为 −1 800s [18] : 。 3.2.1 Smith 预估器参数与被控对象相同 由图 5 可以看出,当 Smith 预估器的参数与 被控对象完全相同时,只要 3 个被调参数为正,系 统输出最终是稳定的,但是动态过程跟参数选择 十分密切,参数调节与性能关系将在下面讨论。 3.2.2 Smith 预估器参数与被控对象不同 当 Smith 预估器参数与被控对象参数不相同 时,按照命题 2 的近似充分条件选择 Smith 预估 器参数,控制参数随意给定,然后进行仿真验证, 如图 6 所示。 0 2 4 6 8 10 0.2 0.4 0.6 0.8 1.0 1.2 yp t/s (a) b0=2×0.85/1 200;wc=0.002 4;wo=3×0.002 4 0 2 4 6 8 10 0.5 1.0 1.5 2.0 yp t/s (b) b0=2;wc=10;wo=10 ×103 ×103 图 5 被控对象准确已知时的阶跃响应 Fig. 5 Step response when plant is accurately known 0 1 2 3 4 5 6 0.2 0.4 0.6 0.8 1.0 1.2 ×104 t/s yp (a) Km=6.4K; Tm=0.95T; τm=0.9τ; b0=3×0.85/1 200; wc=0.002 4; wo=0.008 0 1 2 3 4 5 6 0.2 0.4 0.6 0.8 1.0 1.2 ×104 t/s yp (b) Km=4K; Tm=1.1T; τm=0.8τ; b0=4×0.85/1 200; wc=0.002 4; wo=3×0.002 4 图 6 被控对象大约已知时的阶跃响应 Fig. 6 Step response when plant is approximately known 可以看出,当 Smith 预估器参数与被控对象 不相同时,根据命题 2 选择参数,由于是近似条 件,系统最终可能不稳定,与控制参数选择也相 关,所以,命题 2 有一定的局限性,但也有一定的 参考意义,控制参数与性能的关系将在下面分析。 4 参数分析与设计原则 Gp = 0.85 1 200s+1 e 同样,选择一阶系统: −1 800s,从 系统参数和控制参数两个角度分析参数变化对系 统的影响。 Mp tr(2%) 系统的动态性能指标中比较重要的是最大超 调量 和调整时间 ;系统的稳态性能指标 主要有幅值裕度 GM、相角裕度 PM 和时滞裕度 DM;系统的抗扰性能方面比较重要的指标是扰 第 4 期 王永帅,等:一阶惯性大时滞系统 Smith 预估自抗扰控制 ·503·