正在加载图片...
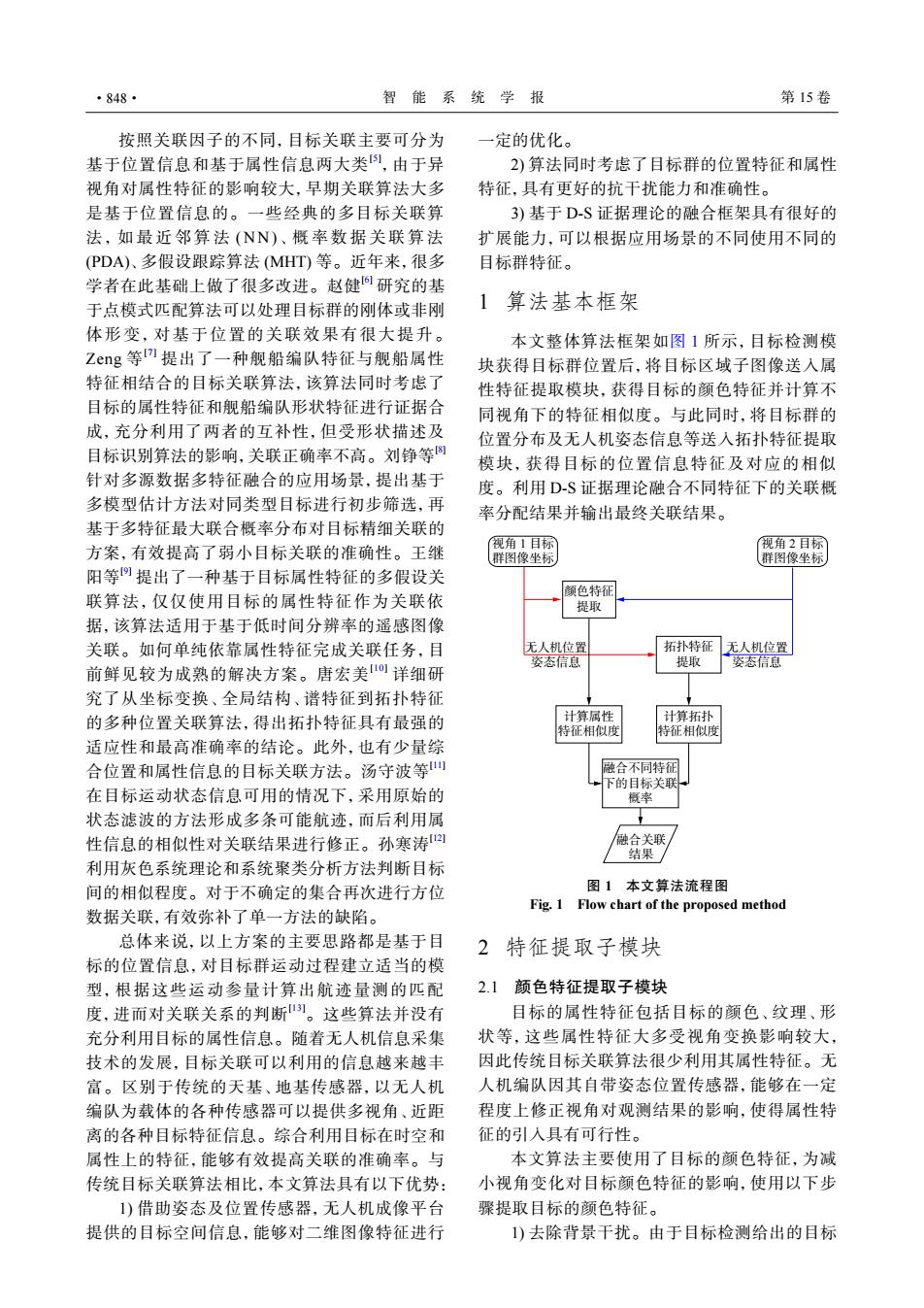
·848· 智能系统学报 第15卷 按照关联因子的不同,目标关联主要可分为 定的优化。 基于位置信息和基于属性信息两大类,由于异 2)算法同时考虑了目标群的位置特征和属性 视角对属性特征的影响较大,早期关联算法大多 特征,具有更好的抗干扰能力和准确性。 是基于位置信息的。一些经典的多目标关联算 3)基于D-S证据理论的融合框架具有很好的 法,如最近邻算法(NN)、概率数据关联算法 扩展能力,可以根据应用场景的不同使用不同的 (PDA)、多假设跟踪算法MHT)等。近年来,很多 目标群特征。 学者在此基础上做了很多改进。赵健阿研究的基 于点模式匹配算法可以处理目标群的刚体或非刚 1算法基本框架 体形变,对基于位置的关联效果有很大提升。 本文整体算法框架如图1所示,目标检测模 Zeng等)提出了一种舰船编队特征与舰船属性 块获得目标群位置后,将目标区域子图像送入属 特征相结合的目标关联算法,该算法同时考虑了 性特征提取模块,获得目标的颜色特征并计算不 目标的属性特征和舰船编队形状特征进行证据合 同视角下的特征相似度。与此同时,将目标群的 成,充分利用了两者的互补性,但受形状描述及 位置分布及无人机姿态信息等送入拓扑特征提取 目标识别算法的影响,关联正确率不高。刘铮等圆 模块,获得目标的位置信息特征及对应的相似 针对多源数据多特征融合的应用场景,提出基于 度。利用D-S证据理论融合不同特征下的关联概 多模型估计方法对同类型目标进行初步筛选,再 率分配结果并输出最终关联结果。 基于多特征最大联合概率分布对目标精细关联的 方案,有效提高了弱小目标关联的准确性。王继 视角1目标 视角2目标 群图像坐标 群图像坐标 阳等9提出了一种基于目标属性特征的多假设关 颜色特征 联算法,仅仅使用目标的属性特征作为关联依 提取 据,该算法适用于基于低时间分辨率的遥感图像 关联。如何单纯依靠属性特征完成关联任务,目 无人机位置 拓扑特征 无人机位置 姿态信息 提取 姿态信息 前鲜见较为成熟的解决方案。唐宏美0详细研 究了从坐标变换、全局结构、谱特征到拓扑特征 的多种位置关联算法,得出拓扑特征具有最强的 计算属性 计算拓扑 特征相似度 特征相似度 适应性和最高准确率的结论。此外,也有少量综 合位置和属性信息的目标关联方法。汤守波等山 融合不同特征 下的目标关联 在目标运动状态信息可用的情况下,采用原始的 概率 状态滤波的方法形成多条可能航迹,而后利用属 性信息的相似性对关联结果进行修正。孙寒涛回 触合关联 结果 利用灰色系统理论和系统聚类分析方法判断目标 间的相似程度。对于不确定的集合再次进行方位 图1本文算法流程图 Fig.1 Flow chart of the proposed method 数据关联,有效弥补了单一方法的缺陷。 总体来说,以上方案的主要思路都是基于目 2 特征提取子模块 标的位置信息,对目标群运动过程建立适当的模 型,根据这些运动参量计算出航迹量测的匹配 2.1 颜色特征提取子模块 度,进而对关联关系的判断1。这些算法并没有 目标的属性特征包括目标的颜色、纹理、形 充分利用目标的属性信息。随着无人机信息采集 状等,这些属性特征大多受视角变换影响较大, 技术的发展,目标关联可以利用的信息越来越丰 因此传统目标关联算法很少利用其属性特征。无 富。区别于传统的天基、地基传感器,以无人机 人机编队因其自带姿态位置传感器,能够在一定 编队为载体的各种传感器可以提供多视角、近距 程度上修正视角对观测结果的影响,使得属性特 离的各种目标特征信息。综合利用目标在时空和 征的引入具有可行性。 属性上的特征,能够有效提高关联的准确率。与 本文算法主要使用了目标的颜色特征,为减 传统目标关联算法相比,本文算法具有以下优势: 小视角变化对目标颜色特征的影响,使用以下步 1)借助姿态及位置传感器,无人机成像平台 骤提取日标的颜色特征。 提供的目标空间信息,能够对二维图像特征进行 1)去除背景干扰。由于目标检测给出的目标按照关联因子的不同,目标关联主要可分为 基于位置信息和基于属性信息两大类[5] ,由于异 视角对属性特征的影响较大,早期关联算法大多 是基于位置信息的。一些经典的多目标关联算 法,如最近邻算 法 (NN)、概率数据关联算 法 (PDA)、多假设跟踪算法 (MHT) 等。近年来,很多 学者在此基础上做了很多改进。赵健[6] 研究的基 于点模式匹配算法可以处理目标群的刚体或非刚 体形变,对基于位置的关联效果有很大提升。 Zeng 等 [7] 提出了一种舰船编队特征与舰船属性 特征相结合的目标关联算法,该算法同时考虑了 目标的属性特征和舰船编队形状特征进行证据合 成,充分利用了两者的互补性,但受形状描述及 目标识别算法的影响,关联正确率不高。刘铮等[8] 针对多源数据多特征融合的应用场景,提出基于 多模型估计方法对同类型目标进行初步筛选,再 基于多特征最大联合概率分布对目标精细关联的 方案,有效提高了弱小目标关联的准确性。王继 阳等[9] 提出了一种基于目标属性特征的多假设关 联算法,仅仅使用目标的属性特征作为关联依 据,该算法适用于基于低时间分辨率的遥感图像 关联。如何单纯依靠属性特征完成关联任务,目 前鲜见较为成熟的解决方案。唐宏美[10] 详细研 究了从坐标变换、全局结构、谱特征到拓扑特征 的多种位置关联算法,得出拓扑特征具有最强的 适应性和最高准确率的结论。此外,也有少量综 合位置和属性信息的目标关联方法。汤守波等[11] 在目标运动状态信息可用的情况下,采用原始的 状态滤波的方法形成多条可能航迹,而后利用属 性信息的相似性对关联结果进行修正。孙寒涛[12] 利用灰色系统理论和系统聚类分析方法判断目标 间的相似程度。对于不确定的集合再次进行方位 数据关联,有效弥补了单一方法的缺陷。 总体来说,以上方案的主要思路都是基于目 标的位置信息,对目标群运动过程建立适当的模 型,根据这些运动参量计算出航迹量测的匹配 度,进而对关联关系的判断[13]。这些算法并没有 充分利用目标的属性信息。随着无人机信息采集 技术的发展,目标关联可以利用的信息越来越丰 富。区别于传统的天基、地基传感器,以无人机 编队为载体的各种传感器可以提供多视角、近距 离的各种目标特征信息。综合利用目标在时空和 属性上的特征,能够有效提高关联的准确率。与 传统目标关联算法相比,本文算法具有以下优势: 1) 借助姿态及位置传感器,无人机成像平台 提供的目标空间信息,能够对二维图像特征进行 一定的优化。 2) 算法同时考虑了目标群的位置特征和属性 特征,具有更好的抗干扰能力和准确性。 3) 基于 D-S 证据理论的融合框架具有很好的 扩展能力,可以根据应用场景的不同使用不同的 目标群特征。 1 算法基本框架 本文整体算法框架如图 1 所示,目标检测模 块获得目标群位置后,将目标区域子图像送入属 性特征提取模块,获得目标的颜色特征并计算不 同视角下的特征相似度。与此同时,将目标群的 位置分布及无人机姿态信息等送入拓扑特征提取 模块,获得目标的位置信息特征及对应的相似 度。利用 D-S 证据理论融合不同特征下的关联概 率分配结果并输出最终关联结果。 视角 1 目标 群图像坐标 视角 2 目标 群图像坐标 颜色特征 提取 拓扑特征 提取 计算拓扑 特征相似度 计算属性 特征相似度 融合不同特征 下的目标关联 概率 融合关联 结果 无人机位置 姿态信息 无人机位置 姿态信息 图 1 本文算法流程图 Fig. 1 Flow chart of the proposed method 2 特征提取子模块 2.1 颜色特征提取子模块 目标的属性特征包括目标的颜色、纹理、形 状等,这些属性特征大多受视角变换影响较大, 因此传统目标关联算法很少利用其属性特征。无 人机编队因其自带姿态位置传感器,能够在一定 程度上修正视角对观测结果的影响,使得属性特 征的引入具有可行性。 本文算法主要使用了目标的颜色特征,为减 小视角变化对目标颜色特征的影响,使用以下步 骤提取目标的颜色特征。 1) 去除背景干扰。由于目标检测给出的目标 ·848· 智 能 系 统 学 报 第 15 卷