正在加载图片...
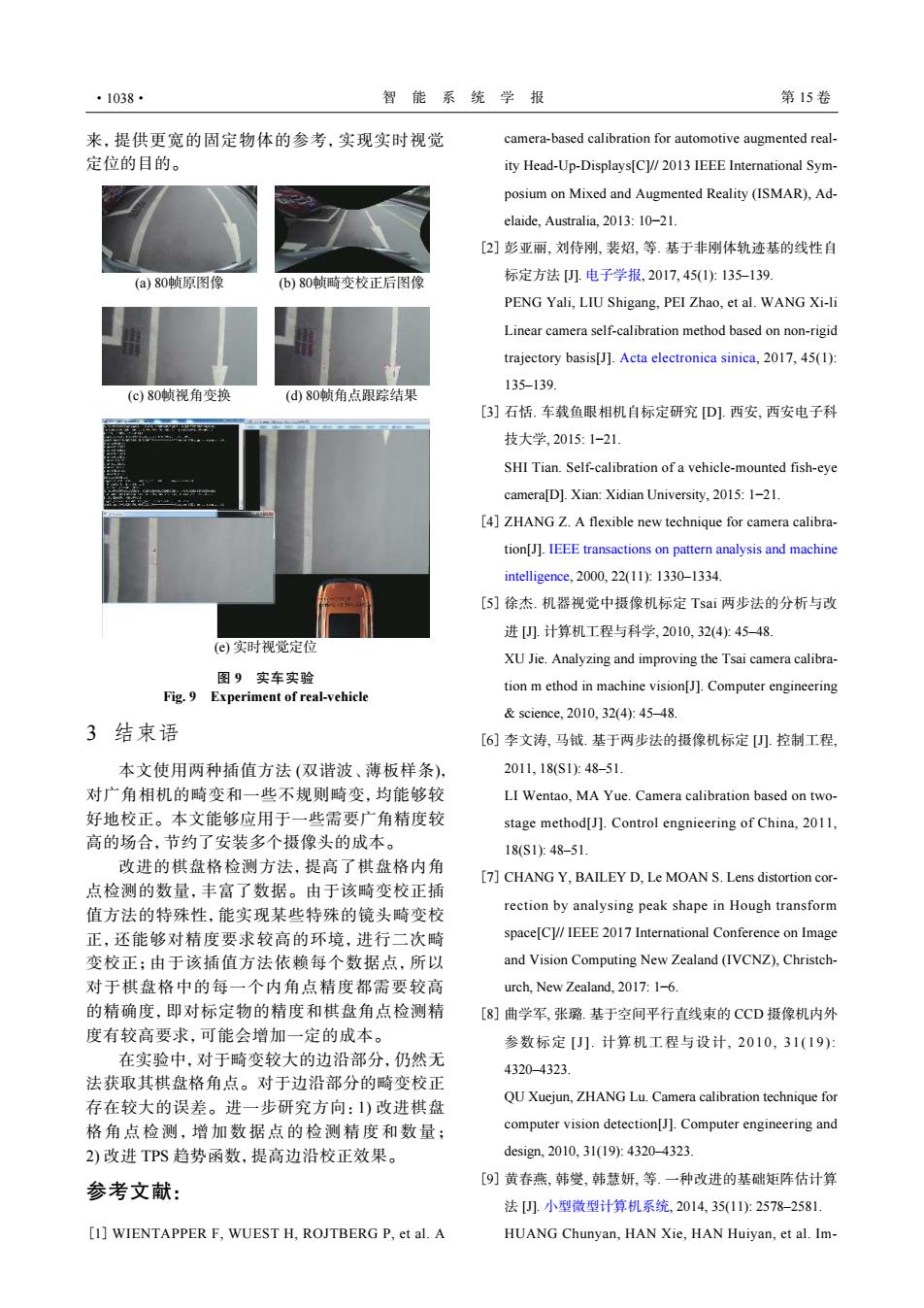
·1038· 智能系统学报 第15卷 来,提供更宽的固定物体的参考,实现实时视觉 camera-based calibration for automotive augmented real- 定位的目的。 ity Head-Up-Displays[C]//2013 IEEE International Sym- posium on Mixed and Augmented Reality (ISMAR),Ad- elaide,Australia,2013:10-21. [2]彭亚丽,刘侍刚,裴炤,等.基于非刚体轨迹基的线性自 (a)80帧原图像 ()80帧畸变校正后图像 标定方法).电子学报,2017,45(1):135-139 PENG Yali,LIU Shigang,PEI Zhao,et al.WANG Xi-li Linear camera self-calibration method based on non-rigid trajectory basis[J].Acta electronica sinica,2017,45(1): 135-139 (c)80帧视角变换 (d80帧角点跟踪结果 [3]石恬.车载鱼眼相机自标定研究D].西安,西安电子科 技大学,2015:1-21 SHI Tian.Self-calibration of a vehicle-mounted fish-eye camera[D].Xian:Xidian University,2015:1-21. [4]ZHANG Z.A flexible new technique for camera calibra- tion[J].IEEE transactions on pattern analysis and machine intelligence,2000,22(1I):1330-1334 [5]徐杰.机器视觉中摄像机标定Tsai两步法的分析与改 进[J.计算机工程与科学,2010,32(4):45-48 (e)实时视觉定位 XU Jie.Analyzing and improving the Tsai camera calibra- 图9实车实验 Fig.9 Experiment of real-vehicle tion m ethod in machine vision[J].Computer engineering &science,.2010,32(4):45-48. 3结束语 [6]李文涛,马钺.基于两步法的摄像机标定U.控制工程, 本文使用两种插值方法(双谐波、薄板样条)。 2011.18(S1):48-51 对广角相机的畸变和一些不规则畸变,均能够较 LI Wentao,MA Yue.Camera calibration based on two- 好地校正。本文能够应用于一些需要广角精度较 stage method[J].Control engnieering of China,2011, 高的场合,节约了安装多个摄像头的成本。 18(S1):48-51 改进的棋盘格检测方法,提高了棋盘格内角 [7]CHANG Y,BAILEY D.Le MOAN S.Lens distortion cor- 点检测的数量,丰富了数据。由于该畸变校正插 值方法的特殊性,能实现某些特殊的镜头畸变校 rection by analysing peak shape in Hough transform 正,还能够对精度要求较高的环境,进行二次畸 space[C]//IEEE 2017 International Conference on Image 变校正;由于该插值方法依赖每个数据点,所以 and Vision Computing New Zealand (IVCNZ),Christch- 对于棋盘格中的每一个内角点精度都需要较高 urch,New Zealand,2017:1-6. 的精确度,即对标定物的精度和棋盘角点检测精 [8]曲学军,张璐.基于空间平行直线束的CCD摄像机内外 度有较高要求,可能会增加一定的成本。 参数标定[J].计算机工程与设计,2010,31(19): 在实验中,对于畸变较大的边沿部分,仍然无 4320-4323 法获取其棋盘格角点。对于边沿部分的畸变校正 存在较大的误差。进一步研究方向:1)改进棋盘 QU Xuejun,ZHANG Lu.Camera calibration technique for 格角点检测,增加数据点的检测精度和数量; computer vision detection[J].Computer engineering and 2)改进TPS趋势函数,提高边沿校正效果。 design,.2010,31(19):4320-4323 [9]黄春燕,韩燮,韩慧妍,等.一种改进的基础矩阵估计算 参考文献: 法).小型微型计算机系统,2014,35(11):2578-2581. [1]WIENTAPPER F,WUEST H,ROJTBERG P,et al.A HUANG Chunyan,HAN Xie,HAN Huiyan,et al.Im来,提供更宽的固定物体的参考,实现实时视觉 定位的目的。 (a) 80帧原图像 (c) 80帧视角变换 (e) 实时视觉定位 (b) 80帧畸变校正后图像 (d) 80帧角点跟踪结果 图 9 实车实验 Fig. 9 Experiment of real-vehicle 3 结束语 本文使用两种插值方法 (双谐波、薄板样条), 对广角相机的畸变和一些不规则畸变,均能够较 好地校正。本文能够应用于一些需要广角精度较 高的场合,节约了安装多个摄像头的成本。 改进的棋盘格检测方法,提高了棋盘格内角 点检测的数量,丰富了数据。由于该畸变校正插 值方法的特殊性,能实现某些特殊的镜头畸变校 正,还能够对精度要求较高的环境,进行二次畸 变校正;由于该插值方法依赖每个数据点,所以 对于棋盘格中的每一个内角点精度都需要较高 的精确度,即对标定物的精度和棋盘角点检测精 度有较高要求,可能会增加一定的成本。 在实验中,对于畸变较大的边沿部分,仍然无 法获取其棋盘格角点。对于边沿部分的畸变校正 存在较大的误差。进一步研究方向:1) 改进棋盘 格角点检测,增加数据点的检测精度和数量; 2) 改进 TPS 趋势函数,提高边沿校正效果。 参考文献: [1] WIENTAPPER F, WUEST H, ROJTBERG P, et al. A camera-based calibration for automotive augmented reality Head-Up-Displays[C]// 2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, Australia, 2013: 10−21. 彭亚丽, 刘侍刚, 裴炤, 等. 基于非刚体轨迹基的线性自 标定方法 [J]. 电子学报, 2017, 45(1): 135–139. PENG Yali, LIU Shigang, PEI Zhao, et al. WANG Xi-li Linear camera self-calibration method based on non-rigid trajectory basis[J]. Acta electronica sinica, 2017, 45(1): 135–139. [2] 石恬. 车载鱼眼相机自标定研究 [D]. 西安, 西安电子科 技大学, 2015: 1−21. SHI Tian. Self-calibration of a vehicle-mounted fish-eye camera[D]. Xian: Xidian University, 2015: 1−21. [3] ZHANG Z. A flexible new technique for camera calibration[J]. IEEE transactions on pattern analysis and machine intelligence, 2000, 22(11): 1330–1334. [4] 徐杰. 机器视觉中摄像机标定 Tsai 两步法的分析与改 进 [J]. 计算机工程与科学, 2010, 32(4): 45–48. XU Jie. Analyzing and improving the Tsai camera calibration m ethod in machine vision[J]. Computer engineering & science, 2010, 32(4): 45–48. [5] 李文涛, 马钺. 基于两步法的摄像机标定 [J]. 控制工程, 2011, 18(S1): 48–51. LI Wentao, MA Yue. Camera calibration based on twostage method[J]. Control engnieering of China, 2011, 18(S1): 48–51. [6] CHANG Y, BAILEY D, Le MOAN S. Lens distortion correction by analysing peak shape in Hough transform space[C]// IEEE 2017 International Conference on Image and Vision Computing New Zealand (IVCNZ), Christchurch, New Zealand, 2017: 1−6. [7] 曲学军, 张璐. 基于空间平行直线束的 CCD 摄像机内外 参数标定 [J]. 计算机工程与设计, 2010, 31(19): 4320–4323. QU Xuejun, ZHANG Lu. Camera calibration technique for computer vision detection[J]. Computer engineering and design, 2010, 31(19): 4320–4323. [8] 黄春燕, 韩燮, 韩慧妍, 等. 一种改进的基础矩阵估计算 法 [J]. 小型微型计算机系统, 2014, 35(11): 2578–2581. HUANG Chunyan, HAN Xie, HAN Huiyan, et al. Im- [9] ·1038· 智 能 系 统 学 报 第 15 卷