正在加载图片...
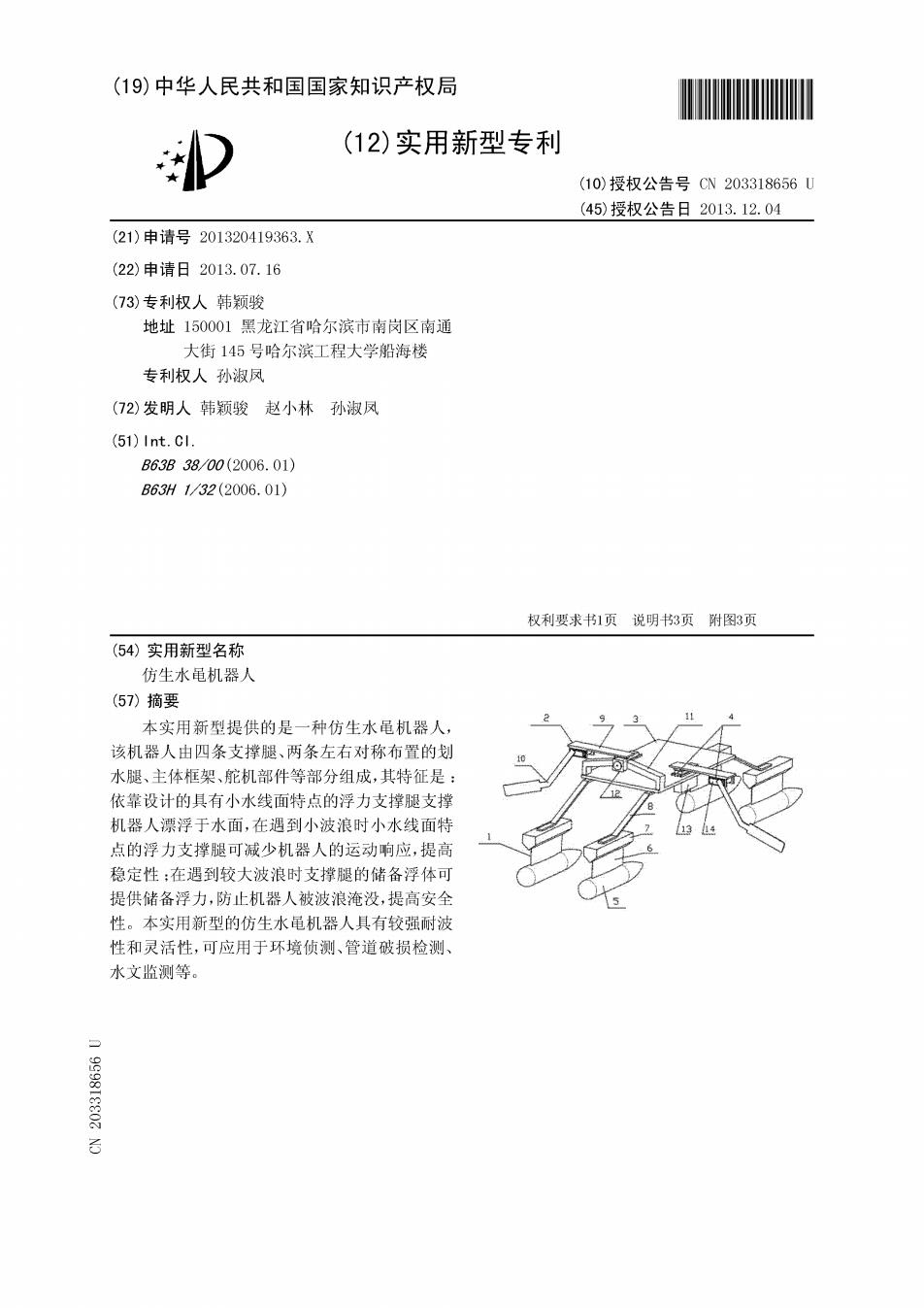
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号CN203318656U (45)授权公告日2013.12.04 (21)申请号201320419363.X (22)申请日2013.07.16 (73)专利权人韩颖骏 地址150001黑龙江省哈尔滨市南岗区南通 大街145号哈尔滨工程大学船海楼 专利权人孙淑凤 (72)发明人韩颖骏赵小林孙淑凤 (51)1nt.cl. B63B38/00(2006.01) B63H132(2006.01) 权利要求书1页说明书3页附图3页 (54)实用新型名称 仿生水黾机器人 (57)摘要 本实用新型提供的是一种仿生水黾机器人, 该机器人由四条支撑腿、两条左右对称布置的划 水腿、主体框架、舵机部件等部分组成,其特征是: 依靠设计的具有小水线面特点的浮力支撑腿支撑 机器人漂浮于水面,在遇到小波浪时小水线面特 点的浮力支撑腿可减少机器人的运动响应,提高 稳定性:在遇到较大波浪时支撑腿的储备浮体可 提供储备浮力,防止机器人被波浪淹没,提高安全 性。本实用新型的仿生水黾机器人具有较强耐波 性和灵活性,可应用于环境侦测、管道破损检测、 水文监测等。 299915900