正在加载图片...
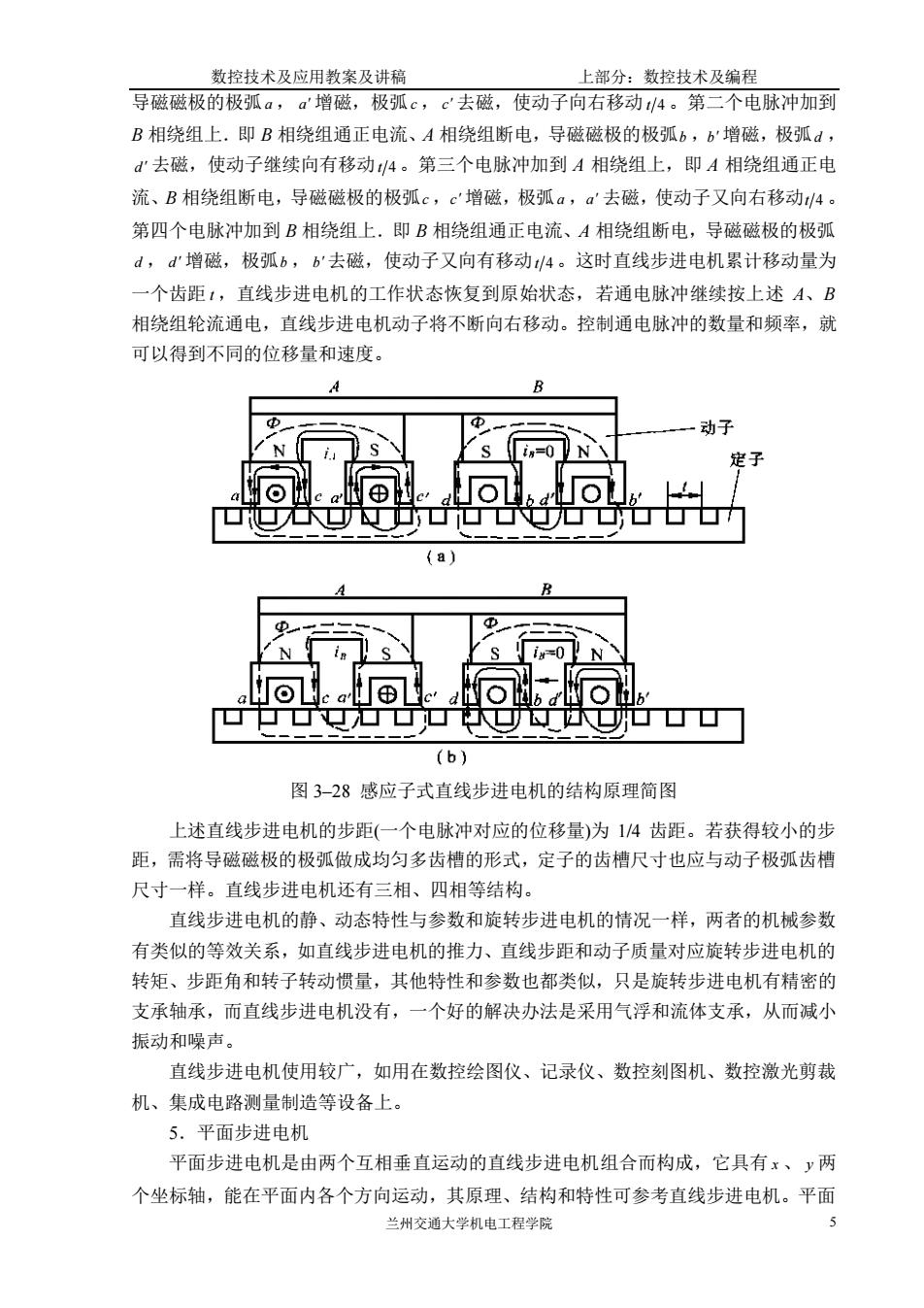
数控技术及应用教案及讲稿 上部分:数控技术及编程 导磁磁极的极弧a,a增磁,极弧c,c去磁,使动子向右移动4。第二个电脉冲加到 B相绕组上.即B相绕组通正电流、A相绕组断电,导磁磁极的极弧6,6增磁,极弧d, d去磁,使动子继续向有移动4。第三个电脉冲加到A相绕组上,即A相绕组通正电 流、B相绕组断电,导磁磁极的极弧c,c增磁,极弧a,a去磁,使动子又向右移动4。 第四个电脉冲加到B相绕组上.即B相绕组通正电流、A相绕组断电,导磁磁极的极弧 d,"增磁,极弧b,b'去磁,使动子又向有移动4。这时直线步进电机累计移动量为 一个齿距1,直线步进电机的工作状态恢复到原始状态,若通电脉冲继续按上述A、B 相绕组轮流通电,直线步进电机动子将不断向右移动。控制通电脉冲的数量和频率,就 可以得到不同的位移量和速度。 动子 (a) ▣▣▣■ (b) 图3-28感应子式直线步进电机的结构原理简图 上述直线步进电机的步距(一个电脉冲对应的位移量)为14齿距。若获得较小的步 距,需将导磁磁极的极弧做成均匀多齿槽的形式,定子的齿槽尺寸也应与动子极弧齿槽 尺寸一样。直线步进电机还有三相、四相等结构。 直线步进电机的静、动态特性与参数和旋转步进电机的情况一样,两者的机械参数 有类似的等效关系,如直线步进电机的推力、直线步距和动子质量对应旋转步进电机的 转矩、步距角和转子转动惯量,其他特性和参数也都类似,只是旋转步进电机有精密的 支承轴承,而直线步进电机没有,一个好的解决办法是采用气浮和流体支承,从而减小 振动和噪声。 直线步进电机使用较广,如用在数控绘图仪、记录仪、数控刻图机、数控激光剪裁 机、集成电路测量制造等设备上。 5.平面步进电机 平面步进电机是由两个互相垂直运动的直线步进电机组合而构成,它具有x、y两 个坐标轴,能在平面内各个方向运动,其原理、结构和特性可参考直线步进电机。平面 兰州交通大学机电工程学院 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 5 导磁磁极的极弧 a , a 增磁,极弧 c ,c 去磁,使动子向右移动 t 4 。第二个电脉冲加到 B 相绕组上.即 B 相绕组通正电流、A 相绕组断电,导磁磁极的极弧 b ,b 增磁,极弧 d , d 去磁,使动子继续向有移动 t 4 。第三个电脉冲加到 A 相绕组上,即 A 相绕组通正电 流、B 相绕组断电,导磁磁极的极弧 c ,c 增磁,极弧 a ,a 去磁,使动子又向右移动 t 4 。 第四个电脉冲加到 B 相绕组上.即 B 相绕组通正电流、A 相绕组断电,导磁磁极的极弧 d , d 增磁,极弧 b ,b 去磁,使动子又向有移动 t 4 。这时直线步进电机累计移动量为 一个齿距 t ,直线步进电机的工作状态恢复到原始状态,若通电脉冲继续按上述 A、B 相绕组轮流通电,直线步进电机动子将不断向右移动。控制通电脉冲的数量和频率,就 可以得到不同的位移量和速度。 图 3–28 感应子式直线步进电机的结构原理简图 上述直线步进电机的步距(一个电脉冲对应的位移量)为 1/4 齿距。若获得较小的步 距,需将导磁磁极的极弧做成均匀多齿槽的形式,定子的齿槽尺寸也应与动子极弧齿槽 尺寸一样。直线步进电机还有三相、四相等结构。 直线步进电机的静、动态特性与参数和旋转步进电机的情况一样,两者的机械参数 有类似的等效关系,如直线步进电机的推力、直线步距和动子质量对应旋转步进电机的 转矩、步距角和转子转动惯量,其他特性和参数也都类似,只是旋转步进电机有精密的 支承轴承,而直线步进电机没有,一个好的解决办法是采用气浮和流体支承,从而减小 振动和噪声。 直线步进电机使用较广,如用在数控绘图仪、记录仪、数控刻图机、数控激光剪裁 机、集成电路测量制造等设备上。 5.平面步进电机 平面步进电机是由两个互相垂直运动的直线步进电机组合而构成,它具有 x 、 y 两 个坐标轴,能在平面内各个方向运动,其原理、结构和特性可参考直线步进电机。平面