正在加载图片...
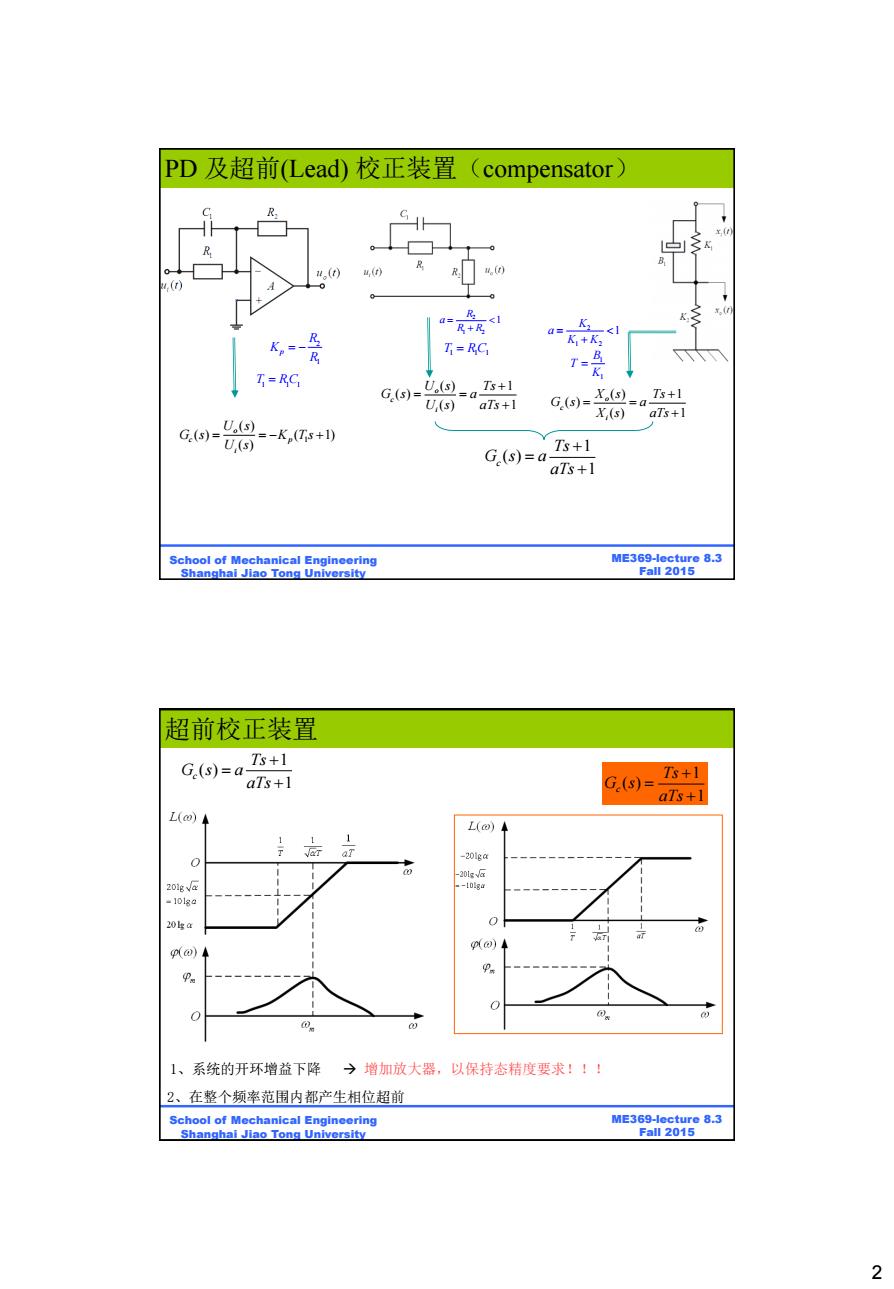
PD及超前Lead)校正装置(compensator) K2 <1 Kp=- R T=RC d=K+K: T=RC -是 G(s)= U。=aTs+l U,(s) aTs+l Gs)==a+ X,(s)aTs+ G(s)= U,(s) US) -K(Ts+1) Ts+1 G.(s)=a aTs+1 School of Mechanical Engineering ME369-lecture 8.3 Shanghai Jiao Tong University Fal12015 超前校正装置 G(s)=a Ts+1 Ts+1 aTs+l G.(S)= aTs+1 L(o)◆ L(o)◆ 1 -201g 201gG 201gv√a -10g =1013a 201ga gpo)◆ a)◆ P. 1、系统的开环增益下降→增加放大器,以保持态精度要求!!! 2、在整个频率范围内都产生相位超前 School of Mechanical Engineering ME369-lecture 8.3 Shanghai Jiao Tong University Fall 2015 22 BE315-Lecture 8.3 Fall 2011 ME369-lecture 8.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University ( ) 1 ( ) ( ) 1 o c i U s Ts G s a U s aTs 2 1 2 1 R a R R T R C 1 1 1 ( ) 1 ( ) ( ) 1 o c i X s Ts G s a X s aTs 2 1 2 1 K a K K 1 1 B T K 1 ( ) 1 c Ts G s a aTs PD 及超前(Lead) 校正装置(compensator) 1 ( ) ( ) ( 1) ( ) o c p i U s G s K T s U s T R C 1 1 1 2 1 p R K R BE315-Lecture 8.3 Fall 2011 ME369-lecture 8.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 ( ) 1 c Ts G s a aTs 1、系统的开环增益下降 增加放大器,以保持态精度要求!!! 超前校正装置 1 ( ) 1 c Ts G s aTs 2、在整个频率范围内都产生相位超前