正在加载图片...
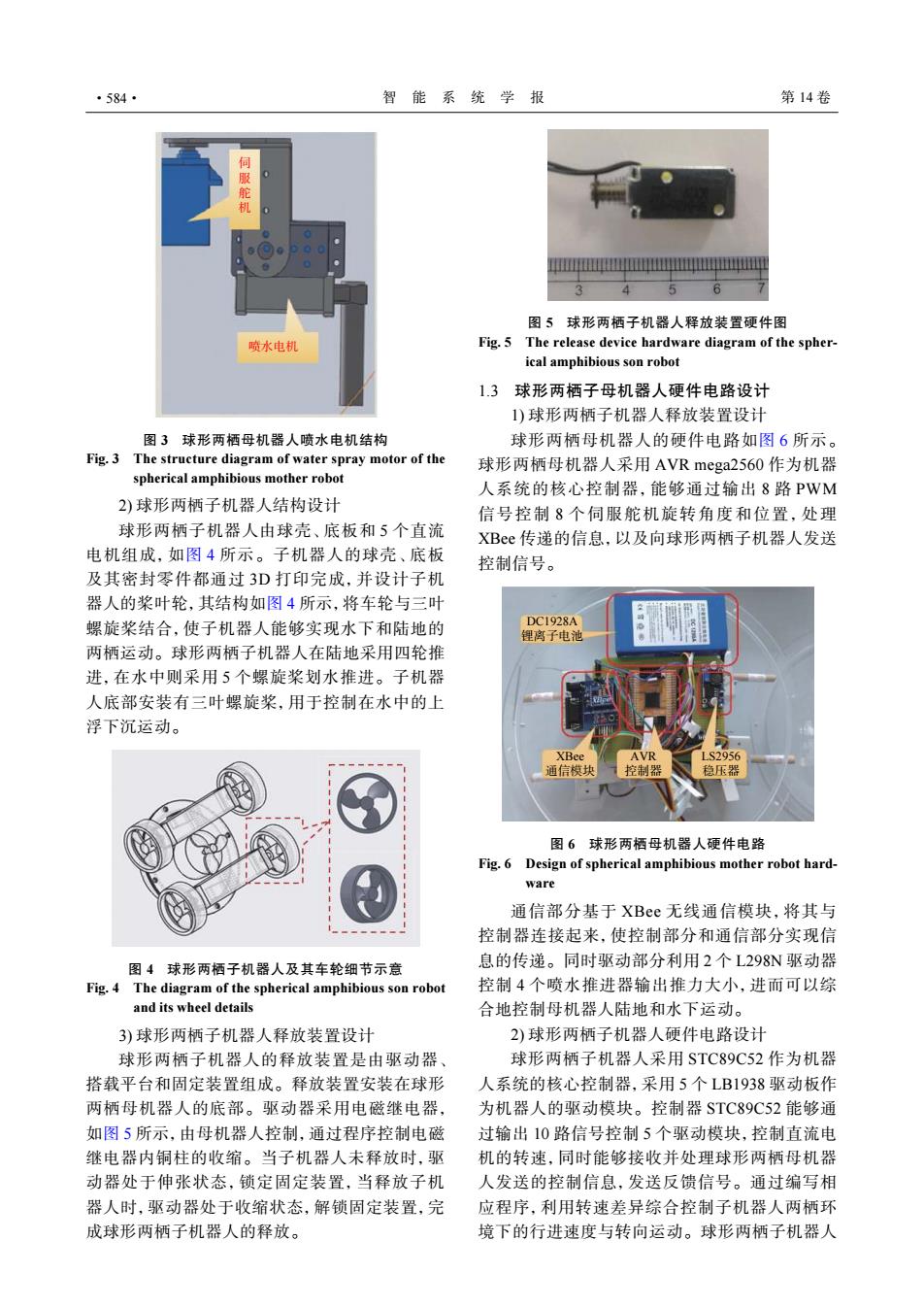
·584· 智能系统学报 第14卷 服能机 0 平 3 4 6 图5球形两栖子机器人释放装置硬件图 喷水电机 Fig.5 The release device hardware diagram of the spher- ical amphibious son robot 1.3球形两栖子母机器人硬件电路设计 1)球形两栖子机器人释放装置设计 图3球形两栖母机器人喷水电机结构 球形两栖母机器人的硬件电路如图6所示。 Fig.3 The structure diagram of water spray motor of the 球形两栖母机器人采用AVR mega2560作为机器 spherical amphibious mother robot 人系统的核心控制器,能够通过输出8路PWM 2)球形两栖子机器人结构设计 信号控制8个伺服舵机旋转角度和位置,处理 球形两栖子机器人由球壳、底板和5个直流 XBee传递的信息,以及向球形两栖子机器人发送 电机组成,如图4所示。子机器人的球壳、底板 控制信号。 及其密封零件都通过3D打印完成,并设计子机 器人的桨叶轮,其结构如图4所示,将车轮与三叶 螺旋桨结合,使子机器人能够实现水下和陆地的 DC1928A 锂离子电池 两栖运动。球形两栖子机器人在陆地采用四轮推 进,在水中则采用5个螺旋桨划水推进。子机器 人底部安装有三叶螺旋桨,用于控制在水中的上 浮下沉运动。 XBee AVR S2956 通信模块 控制器 稳压器 图6球形两栖母机器人硬件电路 Fig.6 Design of spherical amphibious mother robot hard- ware 通信部分基于XBee无线通信模块,将其与 控制器连接起来,使控制部分和通信部分实现信 图4球形两栖子机器人及其车轮细节示意 息的传递。同时驱动部分利用2个L298N驱动器 Fig.4 The diagram of the spherical amphibious son robot 控制4个喷水推进器输出推力大小,进而可以综 and its wheel details 合地控制母机器人陆地和水下运动。 3)球形两栖子机器人释放装置设计 2)球形两栖子机器人硬件电路设计 球形两栖子机器人的释放装置是由驱动器、 球形两栖子机器人采用STC89C52作为机器 搭载平台和固定装置组成。释放装置安装在球形 人系统的核心控制器,采用5个LB1938驱动板作 两栖母机器人的底部。驱动器采用电磁继电器, 为机器人的驱动模块。控制器STC89C52能够通 如图5所示,由母机器人控制,通过程序控制电磁 过输出10路信号控制5个驱动模块,控制直流电 继电器内铜柱的收缩。当子机器人未释放时,驱 机的转速,同时能够接收并处理球形两栖母机器 动器处于仲张状态,锁定固定装置,当释放子机 人发送的控制信息,发送反馈信号。通过编写相 器人时,驱动器处于收缩状态,解锁固定装置,完 应程序,利用转速差异综合控制子机器人两栖环 成球形两栖子机器人的释放。 境下的行进速度与转向运动。球形两栖子机器人喷水电机 伺 服 舵 机 图 3 球形两栖母机器人喷水电机结构 Fig. 3 The structure diagram of water spray motor of the spherical amphibious mother robot 2) 球形两栖子机器人结构设计 球形两栖子机器人由球壳、底板和 5 个直流 电机组成,如图 4 所示。子机器人的球壳、底板 及其密封零件都通过 3D 打印完成,并设计子机 器人的桨叶轮,其结构如图 4 所示,将车轮与三叶 螺旋桨结合,使子机器人能够实现水下和陆地的 两栖运动。球形两栖子机器人在陆地采用四轮推 进,在水中则采用 5 个螺旋桨划水推进。子机器 人底部安装有三叶螺旋桨,用于控制在水中的上 浮下沉运动。 图 4 球形两栖子机器人及其车轮细节示意 Fig. 4 The diagram of the spherical amphibious son robot and its wheel details 3) 球形两栖子机器人释放装置设计 球形两栖子机器人的释放装置是由驱动器、 搭载平台和固定装置组成。释放装置安装在球形 两栖母机器人的底部。驱动器采用电磁继电器, 如图 5 所示,由母机器人控制,通过程序控制电磁 继电器内铜柱的收缩。当子机器人未释放时,驱 动器处于伸张状态,锁定固定装置,当释放子机 器人时,驱动器处于收缩状态,解锁固定装置,完 成球形两栖子机器人的释放。 图 5 球形两栖子机器人释放装置硬件图 Fig. 5 The release device hardware diagram of the spherical amphibious son robot 1.3 球形两栖子母机器人硬件电路设计 1) 球形两栖子机器人释放装置设计 球形两栖母机器人的硬件电路如图 6 所示。 球形两栖母机器人采用 AVR mega2560 作为机器 人系统的核心控制器,能够通过输出 8 路 PWM 信号控制 8 个伺服舵机旋转角度和位置,处理 XBee 传递的信息,以及向球形两栖子机器人发送 控制信号。 XBee 通信模块 AVR 控制器 LS2956 稳压器 DC1928A 锂离子电池 图 6 球形两栖母机器人硬件电路 Fig. 6 Design of spherical amphibious mother robot hardware 通信部分基于 XBee 无线通信模块,将其与 控制器连接起来,使控制部分和通信部分实现信 息的传递。同时驱动部分利用 2 个 L298N 驱动器 控制 4 个喷水推进器输出推力大小,进而可以综 合地控制母机器人陆地和水下运动。 2) 球形两栖子机器人硬件电路设计 球形两栖子机器人采用 STC89C52 作为机器 人系统的核心控制器,采用 5 个 LB1938 驱动板作 为机器人的驱动模块。控制器 STC89C52 能够通 过输出 10 路信号控制 5 个驱动模块,控制直流电 机的转速,同时能够接收并处理球形两栖母机器 人发送的控制信息,发送反馈信号。通过编写相 应程序,利用转速差异综合控制子机器人两栖环 境下的行进速度与转向运动。球形两栖子机器人 ·584· 智 能 系 统 学 报 第 14 卷