正在加载图片...
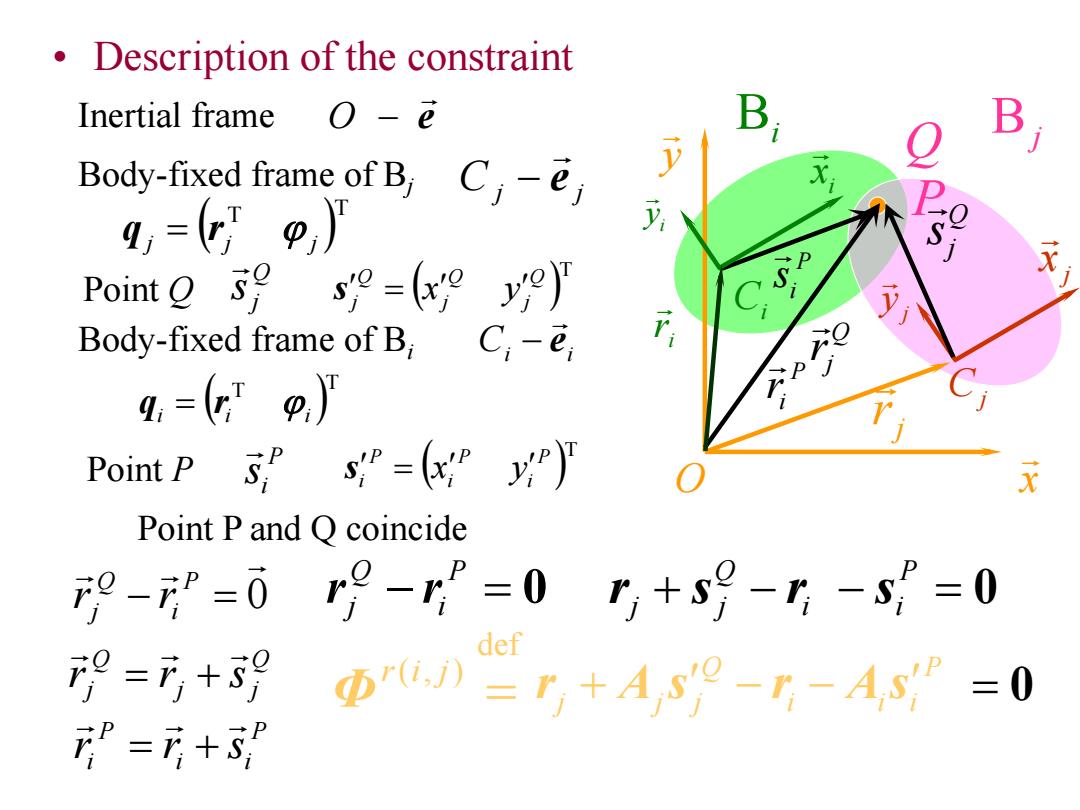
Description of the constraint Inertial frame O-e Body-fixed frame of B C 4=p)' Pointo sosy) Body-fixed frame of B,C,- 4,-g,)r Point p 5s=(kPyP)y Point P and Q coincide 9-=0r9-r=07+s9-1-s=0 def 鸿=+9 D》=r+A,s9-r-As”=0 =+,”• Description of the constraint Bj y x O j x j y Cj j r Q Q j r Q j s e Inertial frame O C j j e Body-fixed frame of Bj T T j j j q r Point Q Q j s Q T j Q j Q j s x y Point P and Q coincide def ( , ) r i j Φ P i s T T i i i q r Point P P i s T P i P i P i s x y i x i y Ci P ir Q j j Q j r r s P i i P ir r s 0 P i Q j r r P i i i Q j j j r A s r A s 0 Bi i r 0 P i Q j r r 0 P i i Q j j r s r s Ci i e Body-fixed frame of Bi P