正在加载图片...
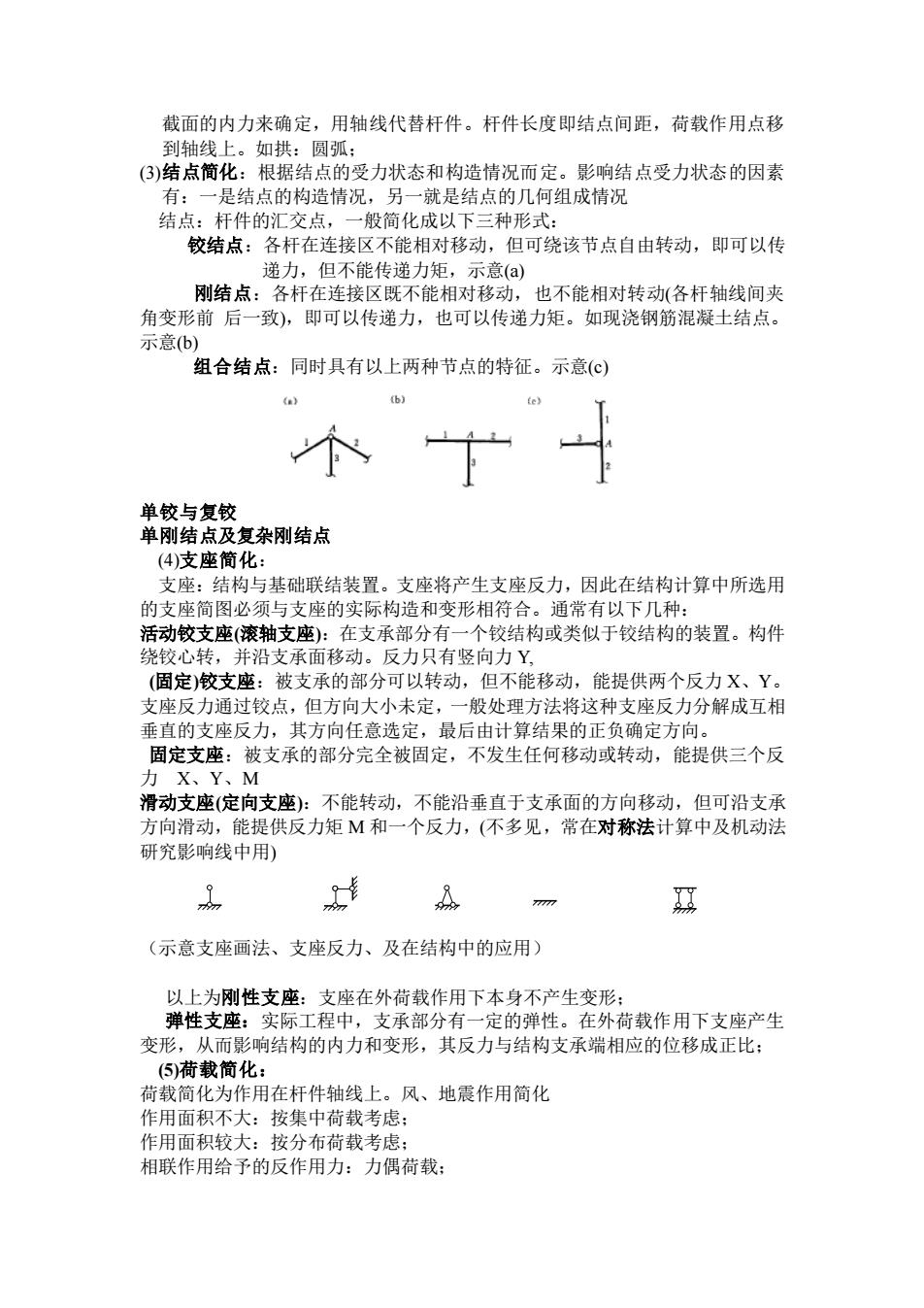
截面的内力来确定,用轴线代替杆件。杆件长度即结点间距,荷载作用点移 到轴线上。加批.周弧 (③)结点简化:根据结点的受力状态和构造情况而定。影响结点受力状态的因素 有: “是结点的构造情况,另一就是结点的几何组成情况 结点:杆件的汇交点,一般简化成以下三种形式: 铰结点:各杆在连接区不能相对移动,但可绕该节点自由转动,即可以传 递力,但不能传递力矩,示意(a) 刚结点:各杆在连接区既不能相对移动,也不能相对转动(各杆轴线间夹 角变形前后一致),即可以传递力,也可以传递力矩。如现浇钢筋混凝土结点。 示意(b) 组合结点:同时具有以上两种节点的特征。示意(©) 0) te) 个 单铰与复较 单刚结点及复杂刚结点 4支座简化 支座:结构与基础联结装置。支座将产生支座反力,因此在结构计算中所选用 的支座简图必须与支座的实际构造和变形相符合。通常有以下几种: 活动饺支座(滚轴支座):在支承部分有一个较结构或类似于铰结构的装置。构件 绕较心转,并沿支承面移动。反力只有竖向力Y (固定)敏支座:被支承的部分可以转动,但不能移动,能提供两个反力X、Y。 支座反力通过铰点,但方向大小未定, 一般处理方法将这种支座反力分解成互相 垂直的支座反力,其方向任意选定,最后由计算结果的正负确定方向。 固定支座:被支承的部分完全被固定,不发生任何移动或转动,能提供三个反 HX Y M 滑动支座(定向支座):不能转动,不能沿垂直于支承面的方向移动,但可沿支承 向动 能提供反力矩M和 个反力,(不多见,常在对称法计算中及机动法 研究影响线中用) (示意支座画法、支座反力、及在结构中的应用) 以上为刚性支座:支座在外荷载作用下本身不产生变形: 弹性支座:实际工程中,支承部分有一定的弹性。在外荷载作用下支座产生 变形,从而影响结构的内力和变形,其反力与结构支承端相应的位移成正比: (5)荷载简化: 荷载简化为作用在杆件轴线上风、地震作用简化 作用面积不大:按集中荷载考虑: 作用面积较大:按分布荷载考虑: 相联作用给予的反作用力:力偶荷载:截面的内力来确定,用轴线代替杆件。杆件长度即结点间距,荷载作用点移 到轴线上。如拱:圆弧; (3)结点简化:根据结点的受力状态和构造情况而定。影响结点受力状态的因素 有:一是结点的构造情况,另一就是结点的几何组成情况 结点:杆件的汇交点,一般简化成以下三种形式: 铰结点:各杆在连接区不能相对移动,但可绕该节点自由转动,即可以传 递力,但不能传递力矩,示意(a) 刚结点:各杆在连接区既不能相对移动,也不能相对转动(各杆轴线间夹 角变形前 后一致),即可以传递力,也可以传递力矩。如现浇钢筋混凝土结点。 示意(b) 组合结点:同时具有以上两种节点的特征。示意(c) 单铰与复铰 单刚结点及复杂刚结点 (4)支座简化: 支座:结构与基础联结装置。支座将产生支座反力,因此在结构计算中所选用 的支座简图必须与支座的实际构造和变形相符合。通常有以下几种: 活动铰支座(滚轴支座):在支承部分有一个铰结构或类似于铰结构的装置。构件 绕铰心转,并沿支承面移动。反力只有竖向力 Y, (固定)铰支座:被支承的部分可以转动,但不能移动,能提供两个反力 X、Y。 支座反力通过铰点,但方向大小未定,一般处理方法将这种支座反力分解成互相 垂直的支座反力,其方向任意选定,最后由计算结果的正负确定方向。 固定支座:被支承的部分完全被固定,不发生任何移动或转动,能提供三个反 力 X、Y、M 滑动支座(定向支座):不能转动,不能沿垂直于支承面的方向移动,但可沿支承 方向滑动,能提供反力矩 M 和一个反力,(不多见,常在对称法计算中及机动法 研究影响线中用) (示意支座画法、支座反力、及在结构中的应用) 以上为刚性支座:支座在外荷载作用下本身不产生变形; 弹性支座:实际工程中,支承部分有一定的弹性。在外荷载作用下支座产生 变形,从而影响结构的内力和变形,其反力与结构支承端相应的位移成正比; (5)荷载简化: 荷载简化为作用在杆件轴线上。风、地震作用简化 作用面积不大:按集中荷载考虑; 作用面积较大:按分布荷载考虑; 相联作用给予的反作用力:力偶荷载;