正在加载图片...
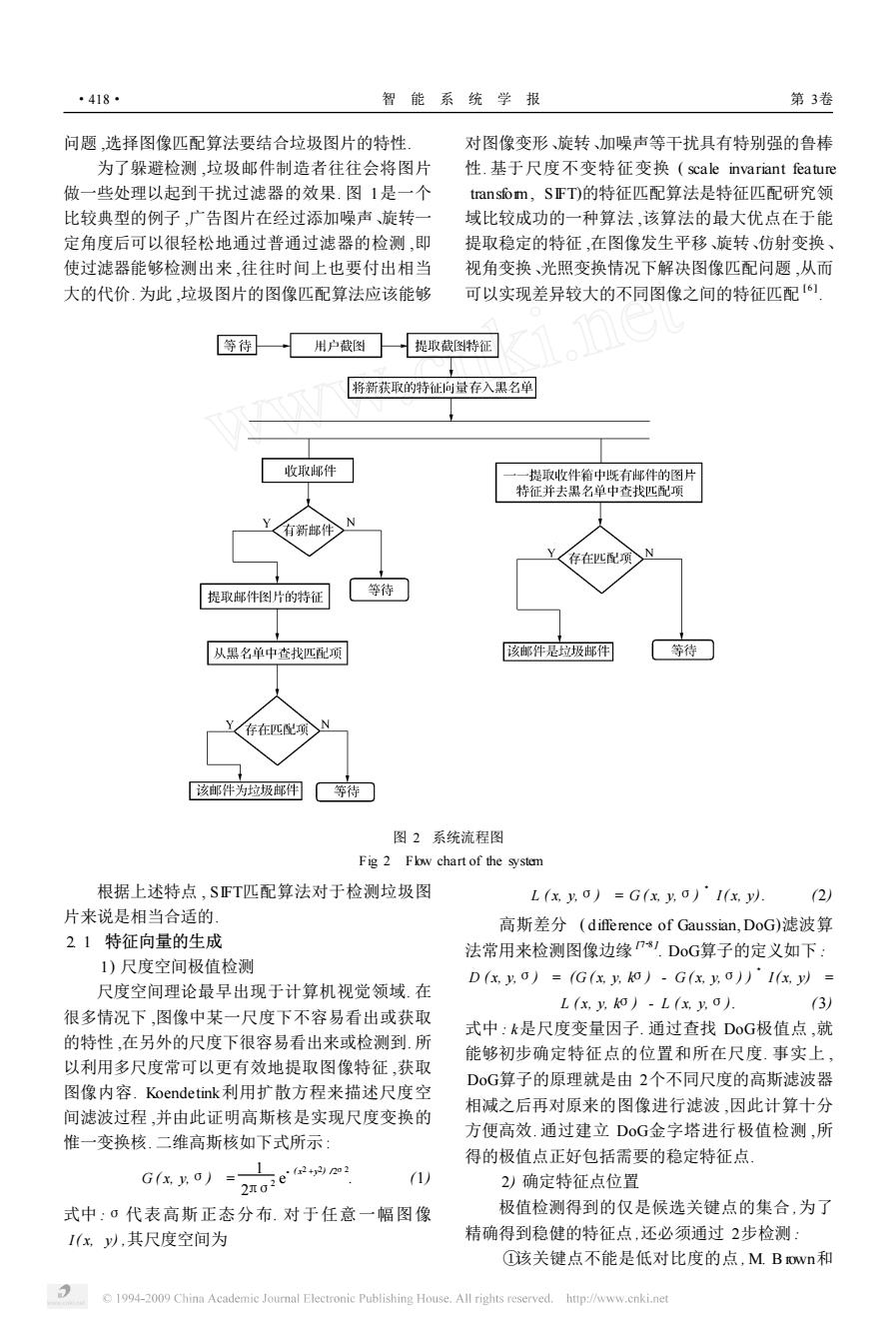
·418- 智能系统学报 第3卷 问题,选择图像匹配算法要结合垃圾图片的特性 对图像变形、旋转、加噪声等干扰具有特别强的鲁棒 为了躲避检测,垃圾邮件制造者往往会将图片 性.基于尺度不变特征变换(scale invariant feature 做一些处理以起到干扰过滤器的效果.图1是一个 transfom,SFT)的特征匹配算法是特征匹配研究领 比较典型的例子,广告图片在经过添加噪声、旋转一 域比较成功的一种算法,该算法的最大优点在于能 定角度后可以很轻松地通过普通过滤器的检测,即 提取稳定的特征,在图像发生平移、旋转、仿射变换、 使过滤器能够检测出来,往往时间上也要付出相当 视角变换、光照变换情况下解决图像匹配问题,从而 大的代价.为此,垃圾图片的图像匹配算法应该能够 可以实现差异较大的不同图像之间的特征匹配61 等待 用户截图 提取截特征 将新获取的特祉向量存入黑名单 收取邮件 提取收件箱中既有邮件的图片 特征并去黑名单中查找匹配项 、有新邮件 N 、存在匹配项 提取邮件图片的特征 等待 从黑名单中查找匹配项 该邮件是垃圾邮件 等待 、存在匹配项 该邮件为垃圾邮件 等待 图2系统流程图 Fig 2 Flow chart of the system 根据上述特点,SFT匹配算法对于检测垃圾图 L(x,g,0)=G(x,go)I(x.y).(2 片来说是相当合适的 高斯差分(difference of Gaussian,DoG)滤波算 21特征向量的生成 法常用来检测图像边缘1.DoG算子的定义如下: 1)尺度空间极值检测 D(x,y.)=(G(x.y,ko G(x,y,I(x,y)= 尺度空间理论最早出现于计算机视觉领域.在 L(x,y.ko )L(x,y.) (3) 很多情况下,图像中某一尺度下不容易看出或获取 式中:k是尺度变量因子.通过查找DoG极值点,就 的特性,在另外的尺度下很容易看出来或检测到.所 能够初步确定特征点的位置和所在尺度.事实上, 以利用多尺度常可以更有效地提取图像特征,获取 DoG算子的原理就是由2个不同尺度的高斯滤波器 图像内容.Koendetink利用扩散方程来描述尺度空 相减之后再对原来的图像进行滤波,因此计算十分 间滤波过程,并由此证明高斯核是实现尺度变换的 方便高效.通过建立DoG金字塔进行极值检测,所 惟一变换核.二维高斯核如下式所示: 2n0e8e2 得的极值点正好包括需要的稳定特征点, Gxy0)=、 (1) 2)确定特征点位置 式中:·代表高斯正态分布.对于任意一幅图像 极值检测得到的仅是候选关键点的集合,为了 1(x,以,其尺度空间为 精确得到稳健的特征点,还必须通过2步检测: ①该关键点不能是低对比度的点,M.Brown和 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net问题 ,选择图像匹配算法要结合垃圾图片的特性. 为了躲避检测 ,垃圾邮件制造者往往会将图片 做一些处理以起到干扰过滤器的效果. 图 1是一个 比较典型的例子 ,广告图片在经过添加噪声、旋转一 定角度后可以很轻松地通过普通过滤器的检测 ,即 使过滤器能够检测出来 ,往往时间上也要付出相当 大的代价. 为此 ,垃圾图片的图像匹配算法应该能够 对图像变形、旋转、加噪声等干扰具有特别强的鲁棒 性. 基于尺度不变特征变换 ( scale invariant feature transform, SIFT)的特征匹配算法是特征匹配研究领 域比较成功的一种算法 ,该算法的最大优点在于能 提取稳定的特征 ,在图像发生平移、旋转、仿射变换、 视角变换、光照变换情况下解决图像匹配问题 ,从而 可以实现差异较大的不同图像之间的特征匹配 [ 6 ] . 图 2 系统流程图 Fig. 2 Flow chart of the system 根据上述特点 , SIFT匹配算法对于检测垃圾图 片来说是相当合适的. 2. 1 特征向量的生成 1) 尺度空间极值检测 尺度空间理论最早出现于计算机视觉领域. 在 很多情况下 ,图像中某一尺度下不容易看出或获取 的特性 ,在另外的尺度下很容易看出来或检测到. 所 以利用多尺度常可以更有效地提取图像特征 ,获取 图像内容. Koendetink利用扩散方程来描述尺度空 间滤波过程 ,并由此证明高斯核是实现尺度变换的 惟一变换核. 二维高斯核如下式所示 : G ( x, y,σ) = 1 2πσ2 e - ( x 2+y 2) /2σ2 . (1) 式中 :σ代表高斯正态分布. 对于任意一幅图像 I( x, y) ,其尺度空间为 L ( x, y,σ) = G ( x, y,σ) 3 I( x, y). (2) 高斯差分 ( difference of Gaussian, DoG)滤波算 法常用来检测图像边缘 [ 728 ] . DoG算子的定义如下 : D ( x, y,σ) = (G ( x, y, kσ) - G ( x, y,σ) ) 3 I( x, y) = L ( x, y, kσ) - L ( x, y,σ). (3) 式中 : k是尺度变量因子. 通过查找 DoG极值点 ,就 能够初步确定特征点的位置和所在尺度. 事实上 , DoG算子的原理就是由 2个不同尺度的高斯滤波器 相减之后再对原来的图像进行滤波 ,因此计算十分 方便高效. 通过建立 DoG金字塔进行极值检测 ,所 得的极值点正好包括需要的稳定特征点. 2) 确定特征点位置 极值检测得到的仅是候选关键点的集合 ,为了 精确得到稳健的特征点 ,还必须通过 2步检测 : ①该关键点不能是低对比度的点 , M. B rown和 ·418· 智 能 系 统 学 报 第 3卷