正在加载图片...
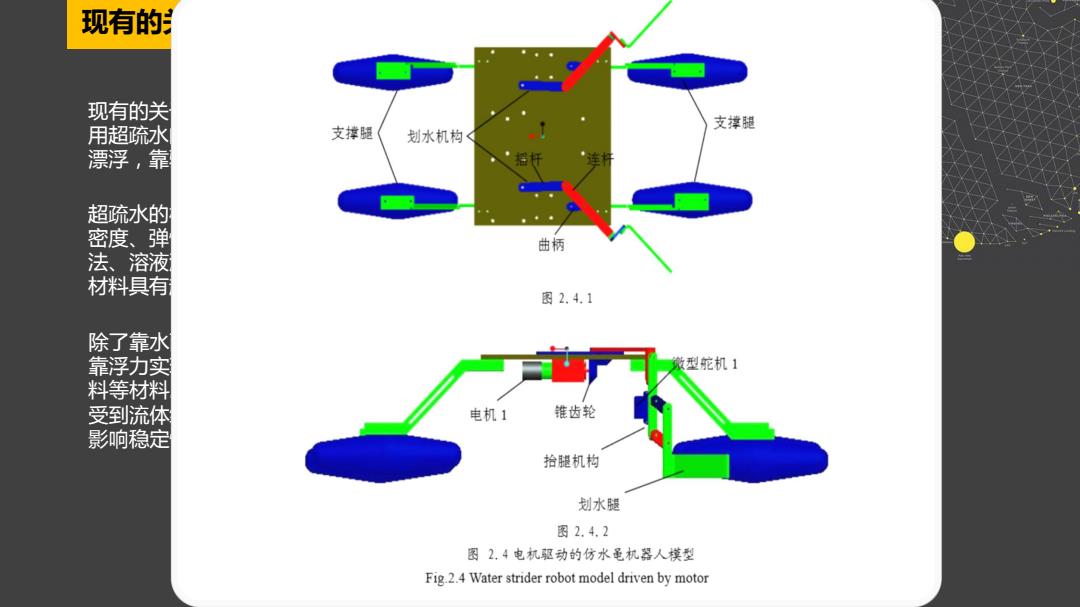
现有的 现有的关 支撑腿 用超疏水 支撑题 划水机构< 漂浮,靠 超疏水的 密度、弹 曲柄 法、溶液 材料具有 图2.4.1 除了靠水 靠浮力实 微型舵机1 料等材料 受到流体 电机1 锥齿轮 影响稳定 拾腿机构 划水腿 图2.4.2 图2,4电机驱动的仿水黾机器人模型 Fig.2.4 Water strider robot model driven by motor现有的关于水黾的仿生 现有的关于水黾的仿生基本思路是模仿水黾的外形, 用超疏水的材料制作仿生水黾腿,靠水面张力实现 漂浮,靠驱动腿的滑动实现水面上的运动。 超疏水的材料主要以铜或钢作为原料(考虑到 密度、弹性模量等因素),并通过电化学沉淀 法、溶液浸泡法、纳米组装法等一系列操作使 材料具有超疏水的特性。 除了靠水面张力实现漂浮,另一种思路是 靠浮力实现,在仿水黾腿时使用如泡沫塑 料等材料。但利用浮力的方法在运动时会 受到流体绕流的影响,产生较大的波纹, 影响稳定性,所以使用较少