正在加载图片...
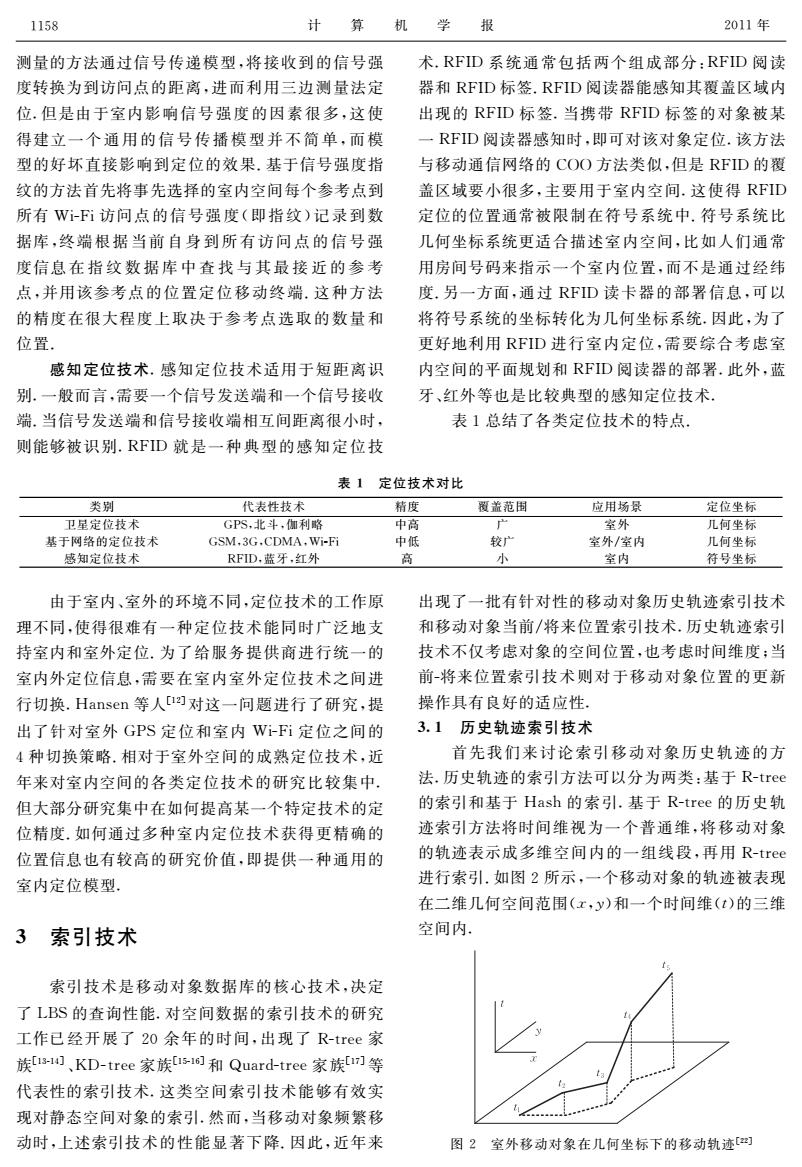
1158 计算 机 学 报 2011年 测量的方法通过信号传递模型,将接收到的信号强 术.RFID系统通常包括两个组成部分:RFID阅读 度转换为到访问点的距离,进而利用三边测量法定 器和RFID标签.RFID阅读器能感知其覆盖区域内 位.但是由于室内影响信号强度的因素很多,这使 出现的RFID标签.当携带RFID标签的对象被某 得建立一个通用的信号传播模型并不简单,而模 一RFD阅读器感知时,即可对该对象定位.该方法 型的好坏直接影响到定位的效果.基于信号强度指 与移动通信网络的C(O)方法类似,但是RFID的覆 纹的方法首先将事先选择的室内空间每个参考点到 盖区域要小很多,主要用于室内空间.这使得RFID 所有Wi-Fi访问点的信号强度(即指纹)记录到数 定位的位置通常被限制在符号系统中,符号系统比 据库,终端根据当前自身到所有访问点的信号强 几何坐标系统更适合描述室内空间,比如人们通常 度信息在指纹数据库中查找与其最接近的参考 用房间号码来指示一个室内位置,而不是通过经纬 点,并用该参考点的位置定位移动终端.这种方法 度.另一方面,通过RFD读卡器的部署信息,可以 的精度在很大程度上取决于参考点选取的数量和 将符号系统的坐标转化为几何坐标系统.因此,为了 位置. 更好地利用RFID进行室内定位,需要综合考虑室 感知定位技术,感知定位技术适用于短距离识 内空间的平面规划和RFD阅读器的部署.此外,蓝 别.一般而言,需要一个信号发送端和一个信号接收 牙、红外等也是比较典型的感知定位技术。 端.当信号发送端和信号接收端相互间距离很小时, 表1总结了各类定位技术的特点。 则能够被识别.RFID就是一种典型的感知定位技 表1定位技术对比 类别 代表性技术 精度 覆盖范固 应用场景 定位坐标 卫星定位技术 GPS,北斗,你利略 中高 广 室外 几何坐标 基于网铬的定位技术 GSM.3G.CDMA.Wi-Fi 中低 较广 室外/室内 几何坐标 感知定位技术 RFID,蓝牙,红外 小 室内 符号坐标 由于室内、室外的环境不同,定位技术的工作原 出现了一批有针对性的移动对象历史轨迹索引技术 理不同,使得很难有一种定位技术能同时广泛地支 和移动对象当前/将来位置索引技术,历史轨迹索引 持室内和室外定位.为了给服务提供商进行统一的 技术不仅考虑对象的空间位置,也考虑时间维度:当 室内外定位信息,需要在室内室外定位技术之间进 前-将来位置索引技术则对于移动对象位置的更新 行切换.Hansen等人]对这一问题进行了研究,提 操作具有良好的适应性。 出了针对室外GPS定位和室内Wi-Fi定位之间的 3.1历史轨迹索引技术 4种切换策略.相对于室外空间的成熟定位技术,近 首先我们来讨论索引移动对象历史轨迹的方 年来对室内空间的各类定位技术的研究比较集中, 法.历史轨迹的索引方法可以分为两类:基于R-tree 但大部分研究集中在如何提高某一个特定技术的定 的索引和基于Hash的索引.基于R-tree的历史轨 位精度.如何通过多种室内定位技术获得更精确的 迹索引方法将时间维视为一个普通维,将移动对象 位置信息也有较高的研究价值,即提供一种通用的 的轨迹表示成多维空间内的一组线段,再用R-tree 室内定位模型. 进行索引.如图2所示,一个移动对象的轨迹被表现 在二维几何空间范围(x,y)和一个时间维(t)的三维 3索引技术 空间内. 索引技术是移动对象数据库的核心技术,决定 了LBS的查询性能.对空间数据的索引技术的研究 工作已经开展了20余年的时间,出现了R-tree家 族1s1们、KD-tree家族s-1和Quard--tree家族]等 代表性的索引技术.这类空间索引技术能够有效实 现对静态空间对象的索引.然而,当移动对象频繁移 动时,上述索引技术的性能显著下降.因此,近年来 图?室外移动对象在几何坐标下的移动轨迹四]测量的方法通过信号传递模型,将接收到的信号强 度转换为到访问点的距离,进而利用三边测量法定 位.但是由于室内影响信号强度的因素很多,这使 得建立一个通用的信号传播模型并不简单,而模 型的好坏直接影响到定位的效果.基于信号强度指 纹的方法首先将事先选择的室内空间每个参考点到 所有WiFi访问点的信号强度(即指纹)记录到数 据库,终端根据当前自身到所有访问点的信号强 度信息在指纹数据库中查找与其最接近的参考 点,并用该参考点的位置定位移动终端.这种方法 的精度在很大程度上取决于参考点选取的数量和 位置.感知定位技术.感知定位技术适用于短距离识 别.一般而言,需要一个信号发送端和一个信号接收 端.当信号发送端和信号接收端相互间距离很小时, 则能够被识别.RFID就是一种典型的感知定位技 术.RFID系统通常包括两个组成部分:RFID阅读 器和RFID标签.RFID阅读器能感知其覆盖区域内 出现的RFID标签.当携带RFID标签的对象被某 一RFID阅读器感知时,即可对该对象定位.该方法 与移动通信网络的COO方法类似,但是RFID的覆 盖区域要小很多,主要用于室内空间.这使得RFID 定位的位置通常被限制在符号系统中.符号系统比 几何坐标系统更适合描述室内空间,比如人们通常 用房间号码来指示一个室内位置,而不是通过经纬 度.另一方面,通过RFID读卡器的部署信息,可以 将符号系统的坐标转化为几何坐标系统.因此,为了 更好地利用RFID进行室内定位,需要综合考虑室 内空间的平面规划和RFID阅读器的部署.此外,蓝 牙、红外等也是比较典型的感知定位技术. 表1总结了各类定位技术的特点. 表1定位技术对比 类别 代表性技术 精度 覆盖范围 应用场景 定位坐标 卫星定位技术 GPS,北斗,伽利略 中高 广 室外 几何坐标 基于网络的定位技术 GSM,3G,CDMA,WiFi 中低 较广 室外/室内 几何坐标 感知定位技术 RFID,蓝牙,红外 高 小 室内 符号坐标 由于室内、室外的环境不同,定位技术的工作原 理不同,使得很难有一种定位技术能同时广泛地支 持室内和室外定位.为了给服务提供商进行统一的 室内外定位信息,需要在室内室外定位技术之间进 行切换.Hansen等人[12]对这一问题进行了研究,提 出了针对室外GPS定位和室内WiFi定位之间的 4种切换策略.相对于室外空间的成熟定位技术,近 年来对室内空间的各类定位技术的研究比较集中. 但大部分研究集中在如何提高某一个特定技术的定 位精度.如何通过多种室内定位技术获得更精确的 位置信息也有较高的研究价值,即提供一种通用的 室内定位模型. 3索引技术 索引技术是移动对象数据库的核心技术,决定 了LBS的查询性能.对空间数据的索引技术的研究 工作已经开展了20余年的时间,出现了Rtree家 族[1314]、KDtree家族[1516]和Quardtree家族[17]等 代表性的索引技术.这类空间索引技术能够有效实 现对静态空间对象的索引.然而,当移动对象频繁移 动时,上述索引技术的性能显著下降.因此,近年来 出现了一批有针对性的移动对象历史轨迹索引技术 和移动对象当前/将来位置索引技术.历史轨迹索引 技术不仅考虑对象的空间位置,也考虑时间维度;当 前将来位置索引技术则对于移动对象位置的更新 操作具有良好的适应性. 31历史轨迹索引技术 首先我们来讨论索引移动对象历史轨迹的方 法.历史轨迹的索引方法可以分为两类:基于Rtree 的索引和基于Hash的索引.基于Rtree的历史轨 迹索引方法将时间维视为一个普通维,将移动对象 的轨迹表示成多维空间内的一组线段,再用Rtree 进行索引.如图2所示,一个移动对象的轨迹被表现 在二维几何空间范围(狓,狔)和一个时间维(狋)的三维 空间内. 图2室外移动对象在几何坐标下的移动轨迹[22] 1158 计 算 机 学 报 2011年