正在加载图片...
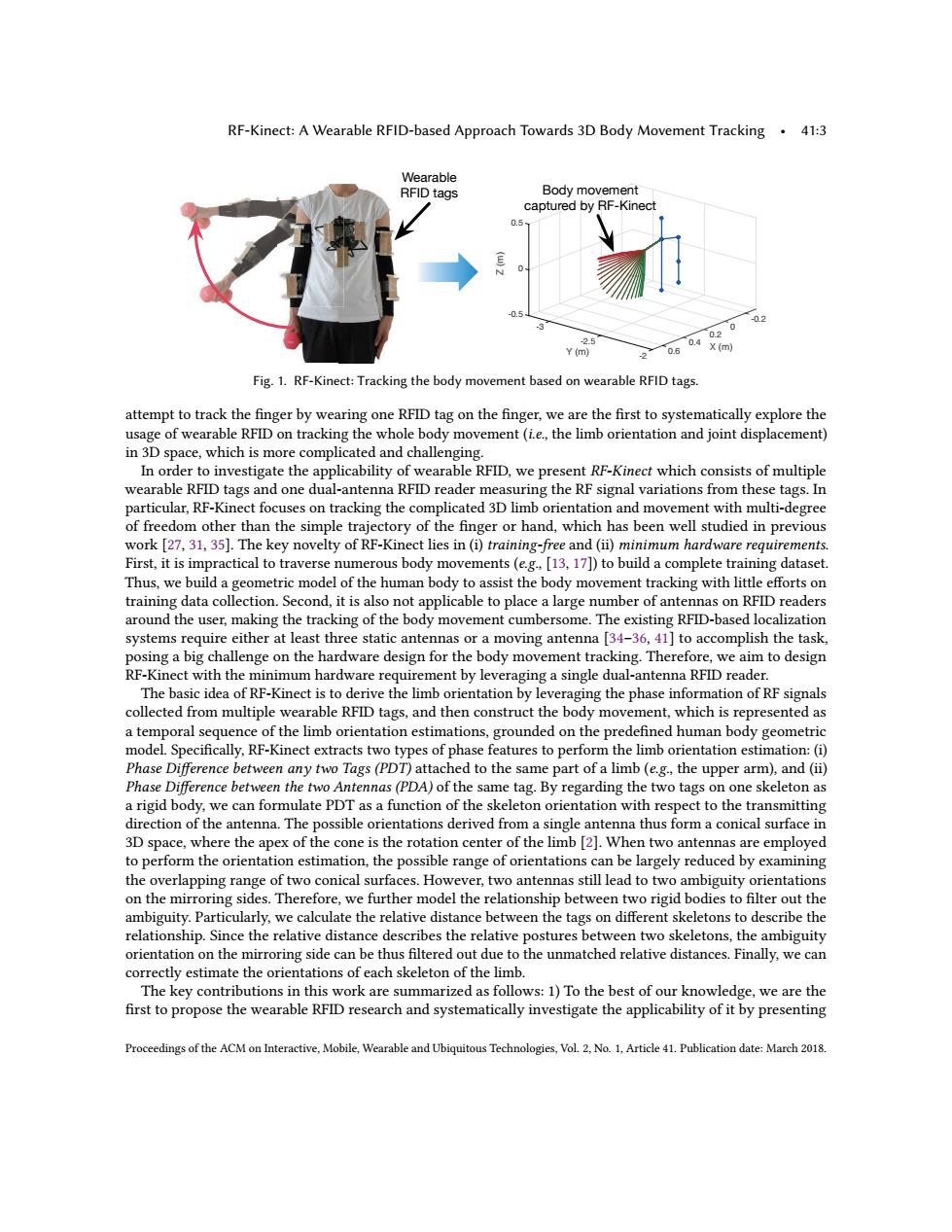
RF-Kinect:A Wearable RFID-based Approach Towards 3D Body Movement Tracking.41:3 Wearable RFID tags Body movement captured by RF-Kinect 0.5 0.5 02 25 030 Y (m) 21 060 X (m) Fig.1.RF-Kinect:Tracking the body movement based on wearable RFID tags. attempt to track the finger by wearing one RFID tag on the finger,we are the first to systematically explore the usage of wearable RFID on tracking the whole body movement(i.e.,the limb orientation and joint displacement) in 3D space,which is more complicated and challenging. In order to investigate the applicability of wearable RFID,we present RF-Kinect which consists of multiple wearable RFID tags and one dual-antenna RFID reader measuring the RF signal variations from these tags.In particular,RF-Kinect focuses on tracking the complicated 3D limb orientation and movement with multi-degree of freedom other than the simple trajectory of the finger or hand,which has been well studied in previous work [27,31,35].The key novelty of RF-Kinect lies in (i)training-free and(ii)minimum hardware requirements. First,it is impractical to traverse numerous body movements(e.g,[13,17])to build a complete training dataset. Thus,we build a geometric model of the human body to assist the body movement tracking with little efforts on training data collection.Second,it is also not applicable to place a large number of antennas on RFID readers around the user,making the tracking of the body movement cumbersome.The existing RFID-based localization systems require either at least three static antennas or a moving antenna [34-36,41]to accomplish the task, posing a big challenge on the hardware design for the body movement tracking.Therefore,we aim to design RF-Kinect with the minimum hardware requirement by leveraging a single dual-antenna RFID reader. The basic idea of RF-Kinect is to derive the limb orientation by leveraging the phase information of RF signals collected from multiple wearable RFID tags,and then construct the body movement,which is represented as a temporal sequence of the limb orientation estimations,grounded on the predefined human body geometric model.Specifically,RF-Kinect extracts two types of phase features to perform the limb orientation estimation:(i) Phase Difference between any two Tags(PDT)attached to the same part of a limb(e.g,the upper arm),and (ii) Phase Difference between the two Antennas(PDA)of the same tag.By regarding the two tags on one skeleton as a rigid body,we can formulate PDT as a function of the skeleton orientation with respect to the transmitting direction of the antenna.The possible orientations derived from a single antenna thus form a conical surface in 3D space,where the apex of the cone is the rotation center of the limb [2].When two antennas are employed to perform the orientation estimation,the possible range of orientations can be largely reduced by examining the overlapping range of two conical surfaces.However,two antennas still lead to two ambiguity orientations on the mirroring sides.Therefore,we further model the relationship between two rigid bodies to filter out the ambiguity.Particularly,we calculate the relative distance between the tags on different skeletons to describe the relationship.Since the relative distance describes the relative postures between two skeletons,the ambiguity orientation on the mirroring side can be thus filtered out due to the unmatched relative distances.Finally,we can correctly estimate the orientations of each skeleton of the limb The key contributions in this work are summarized as follows:1)To the best of our knowledge,we are the first to propose the wearable RFID research and systematically investigate the applicability of it by presenting Proceedings of the ACM on Interactive,Mobile,Wearable and Ubiquitous Technologies,Vol.2,No.1,Article 41.Publication date:March 2018.RF-Kinect: A Wearable RFID-based Approach Towards 3D Body Movement Tracking • 41:3 !"#$ " %&'() "#$ "#* "#+ !$ !$#, -&'() !. !"#, " "#, /&'() !"#$#%&"' ()*+',#-. /012'304"3"5,' 6#7,8$"1'%2'()9:;5"6, Fig. 1. RF-Kinect: Tracking the body movement based on wearable RFID tags. attempt to track the finger by wearing one RFID tag on the finger, we are the first to systematically explore the usage of wearable RFID on tracking the whole body movement (i.e., the limb orientation and joint displacement) in 3D space, which is more complicated and challenging. In order to investigate the applicability of wearable RFID, we present RF-Kinect which consists of multiple wearable RFID tags and one dual-antenna RFID reader measuring the RF signal variations from these tags. In particular, RF-Kinect focuses on tracking the complicated 3D limb orientation and movement with multi-degree of freedom other than the simple trajectory of the finger or hand, which has been well studied in previous work [27, 31, 35]. The key novelty of RF-Kinect lies in (i) training-free and (ii) minimum hardware requirements. First, it is impractical to traverse numerous body movements (e.g., [13, 17]) to build a complete training dataset. Thus, we build a geometric model of the human body to assist the body movement tracking with little efforts on training data collection. Second, it is also not applicable to place a large number of antennas on RFID readers around the user, making the tracking of the body movement cumbersome. The existing RFID-based localization systems require either at least three static antennas or a moving antenna [34–36, 41] to accomplish the task, posing a big challenge on the hardware design for the body movement tracking. Therefore, we aim to design RF-Kinect with the minimum hardware requirement by leveraging a single dual-antenna RFID reader. The basic idea of RF-Kinect is to derive the limb orientation by leveraging the phase information of RF signals collected from multiple wearable RFID tags, and then construct the body movement, which is represented as a temporal sequence of the limb orientation estimations, grounded on the predefined human body geometric model. Specifically, RF-Kinect extracts two types of phase features to perform the limb orientation estimation: (i) Phase Difference between any two Tags (PDT) attached to the same part of a limb (e.g., the upper arm), and (ii) Phase Difference between the two Antennas (PDA) of the same tag. By regarding the two tags on one skeleton as a rigid body, we can formulate PDT as a function of the skeleton orientation with respect to the transmitting direction of the antenna. The possible orientations derived from a single antenna thus form a conical surface in 3D space, where the apex of the cone is the rotation center of the limb [2]. When two antennas are employed to perform the orientation estimation, the possible range of orientations can be largely reduced by examining the overlapping range of two conical surfaces. However, two antennas still lead to two ambiguity orientations on the mirroring sides. Therefore, we further model the relationship between two rigid bodies to filter out the ambiguity. Particularly, we calculate the relative distance between the tags on different skeletons to describe the relationship. Since the relative distance describes the relative postures between two skeletons, the ambiguity orientation on the mirroring side can be thus filtered out due to the unmatched relative distances. Finally, we can correctly estimate the orientations of each skeleton of the limb. The key contributions in this work are summarized as follows: 1) To the best of our knowledge, we are the first to propose the wearable RFID research and systematically investigate the applicability of it by presenting Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, Vol. 2, No. 1, Article 41. Publication date: March 2018