正在加载图片...
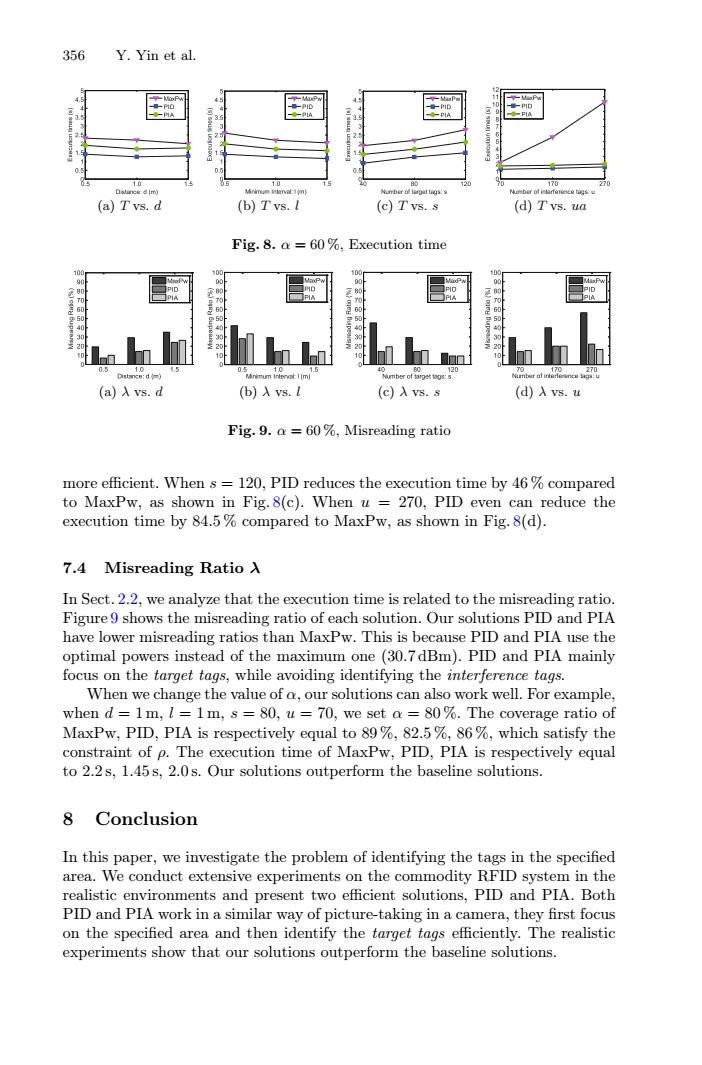
356 Y.Yin et al. a1 -0 一P 1自 170 Dalince d im) Mnimum itervol:1on) Numrher of tarpat tigs: 4 ber ot inarforncog在u (a)Tvs.d (b)Tvs.I (c)T vs.s (d)Tvs.ua Fig.8.a =60%,Execution time PID PIA 50 0.5 10 18 0.5 10 1.5 Dtn心8:d-) mbero 80 120 (a)入vs.d (b)入vs.l (c)λvs.s (d)λvs.u Fig.9.a =60%,Misreading ratio more efficient.When s =120,PID reduces the execution time by 46 compared to MaxPw,as shown in Fig.8(c).When u 270,PID even can reduce the execution time by 84.5%compared to MaxPw,as shown in Fig.8(d). 7.4 Tisreading Ratio入 In Sect.2.2,we analyze that the execution time is related to the misreading ratio. Figure 9 shows the misreading ratio of each solution.Our solutions PID and PIA have lower misreading ratios than MaxPw.This is because PID and PIA use the optimal powers instead of the maximum one(30.7dBm).PID and PIA mainly focus on the target tags,while avoiding identifying the interference tags. When we change the value of a,our solutions can also work well.For example, when d=1m,I=1m,s =80,u=70,we set a =80%.The coverage ratio of MaxPw,PID,PIA is respectively equal to 89%,82.5 %86%,which satisfy the constraint of p.The execution time of MaxPw,PID,PIA is respectively equal to 2.2s,1.45s,2.0s.Our solutions outperform the baseline solutions. 8 Conclusion In this paper,we investigate the problem of identifying the tags in the specified area.We conduct extensive experiments on the commodity RFID system in the realistic environments and present two efficient solutions,PID and PIA.Both PID and PIA work in a similar way of picture-taking in a camera,they first focus on the specified area and then identify the target tags efficiently.The realistic experiments show that our solutions outperform the baseline solutions.356 Y. Yin et al. (a) T vs. d (b) T vs. l (c) T vs. s (d) T vs. ua Fig. 8. α = 60 %, Execution time (a) λ vs. d (b) λ vs. l (c) λ vs. s (d) λ vs. u Fig. 9. α = 60 %, Misreading ratio more efficient. When s = 120, PID reduces the execution time by 46 % compared to MaxPw, as shown in Fig. 8(c). When u = 270, PID even can reduce the execution time by 84.5 % compared to MaxPw, as shown in Fig. 8(d). 7.4 Misreading Ratio λ In Sect. 2.2, we analyze that the execution time is related to the misreading ratio. Figure 9 shows the misreading ratio of each solution. Our solutions PID and PIA have lower misreading ratios than MaxPw. This is because PID and PIA use the optimal powers instead of the maximum one (30.7 dBm). PID and PIA mainly focus on the target tags, while avoiding identifying the interference tags. When we change the value of α, our solutions can also work well. For example, when d = 1 m, l = 1 m, s = 80, u = 70, we set α = 80 %. The coverage ratio of MaxPw, PID, PIA is respectively equal to 89 %, 82.5 %, 86 %, which satisfy the constraint of ρ. The execution time of MaxPw, PID, PIA is respectively equal to 2.2 s, 1.45 s, 2.0 s. Our solutions outperform the baseline solutions. 8 Conclusion In this paper, we investigate the problem of identifying the tags in the specified area. We conduct extensive experiments on the commodity RFID system in the realistic environments and present two efficient solutions, PID and PIA. Both PID and PIA work in a similar way of picture-taking in a camera, they first focus on the specified area and then identify the target tags efficiently. The realistic experiments show that our solutions outperform the baseline solutions