正在加载图片...
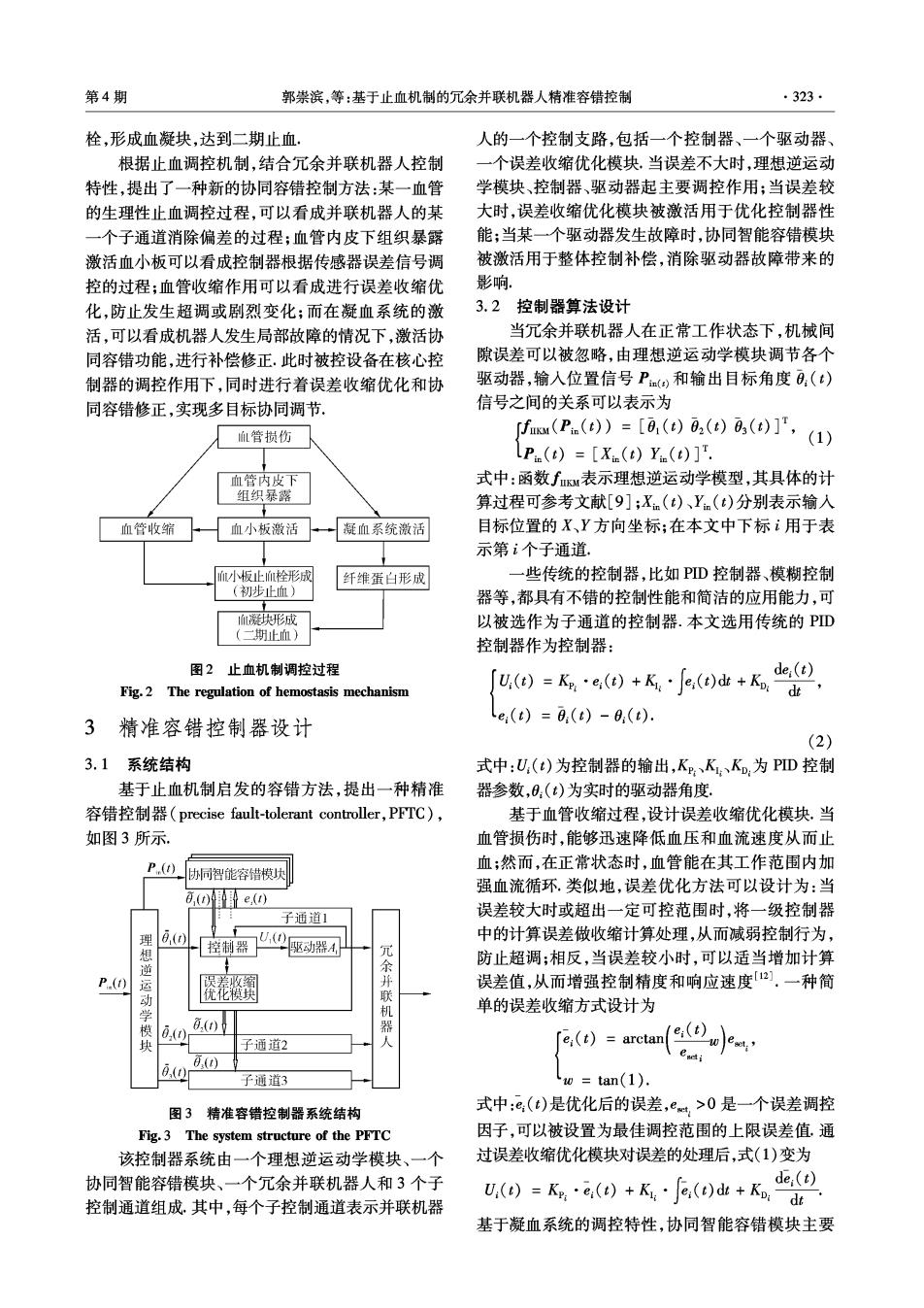
第4期 郭崇滨,等:基于止血机制的冗余并联机器人精准容错控制 ·323. 栓,形成血凝块,达到二期止血. 人的一个控制支路,包括一个控制器、一个驱动器、 根据止血调控机制,结合冗余并联机器人控制 一个误差收缩优化模块.当误差不大时,理想逆运动 特性,提出了一种新的协同容错控制方法:某一血管 学模块、控制器、驱动器起主要调控作用;当误差较 的生理性止血调控过程,可以看成并联机器人的某 大时,误差收缩优化模块被激活用于优化控制器性 一个子通道消除偏差的过程;血管内皮下组织暴露 能;当某一个驱动器发生故障时,协同智能容错模块 激活血小板可以看成控制器根据传感器误差信号调 被激活用于整体控制补偿,消除驱动器故障带来的 控的过程;血管收缩作用可以看成进行误差收缩优 影响. 化,防止发生超调或剧烈变化;而在凝血系统的激 3.2控制器算法设计 活,可以看成机器人发生局部故障的情况下,激活协 当冗余并联机器人在正常工作状态下,机械间 同容错功能,进行补偿修正.此时被控设备在核心控 隙误差可以被忽略,由理想逆运动学模块调节各个 制器的调控作用下,同时进行着误差收缩优化和协 驱动器,输入位置信号Po和输出目标角度:(t) 同容错修正,实现多目标协同调节、 信号之间的关系可以表示为 血管损伤 im(P.()=[a()a,(a,(]',(4) LP(t)=[X(t)Y(t)]". 血管内皮下 式中:函数∫m表示理想逆运动学模型,其具体的计 组织暴露 算过程可参考文献[9];X(t)、Yn(t)分别表示输入 血管收缩 血小板激活一凝血系统激活 目标位置的X、Y方向坐标;在本文中下标i用于表 示第i个子通道. 小板止栓形成 纤维蛋白形成 一些传统的控制器,比如PD控制器、模糊控制 (初步止血) 器等,都具有不错的控制性能和简洁的应用能力,可 凝块形成 以被选作为子通道的控制器.本文选用传统的PD 二期止血) 控制器作为控制器: 图2止血机制调控过程 Fig.2 The regulation of hemostasis mechanism u0=Kg回+K0业+K. de;(t) 3 精准容错控制器设计 e:(t)=0(t)-0,(t). (2) 3.1系统结构 式中:U,(t)为控制器的输出,Kg,K、Ko,为PID控制 基于止血机制启发的容错方法,提出一种精准 器参数,0,(t)为实时的驱动器角度。 容错控制器(precise fault--tolerant controller,PFTC), 基于血管收缩过程,设计误差收缩优化模块.当 如图3所示 血管损伤时,能够迅速降低血压和血流速度从而止 P.) 血;然而,在正常状态时,血管能在其工作范围内加 协同智能容错模块 强血流循环,类似地,误差优化方法可以设计为:当 a0)e0 子通道] 误差较大时或超出一定可控范围时,将一级控制器 理(©控制器 中的计算误差做收缩计算处理,从而减弱控制行为, U哪动器A 余 防止超调:相反,当误差较小时,可以适当增加计算 P.(t) 运 误差收缩 误差值,从而增强控制精度和响应速度2].一种简 动 优花模块 联 单的误差收缩方式设计为 0,(t0 百,(t) 器 子通道2 Te(t) =arctan:(e)j 日(t) 0,( 子通道3 w tan(1). 图3精准容错控制器系统结构 式中:e,(t)是优化后的误差,et>0是一个误差调控 Fig.3 The system structure of the PFTC 因子,可以被设置为最佳调控范围的上限误差值.通 该控制器系统由一个理想逆运动学模块、一个 过误差收缩优化模块对误差的处理后,式(1)变为 协同智能容错模块、一个冗余并联机器人和3个子 控制通道组成。其中,每个子控制通道表示并联机器 U0=k0+60+K0 基于凝血系统的调控特性,协同智能容错模块主要