正在加载图片...
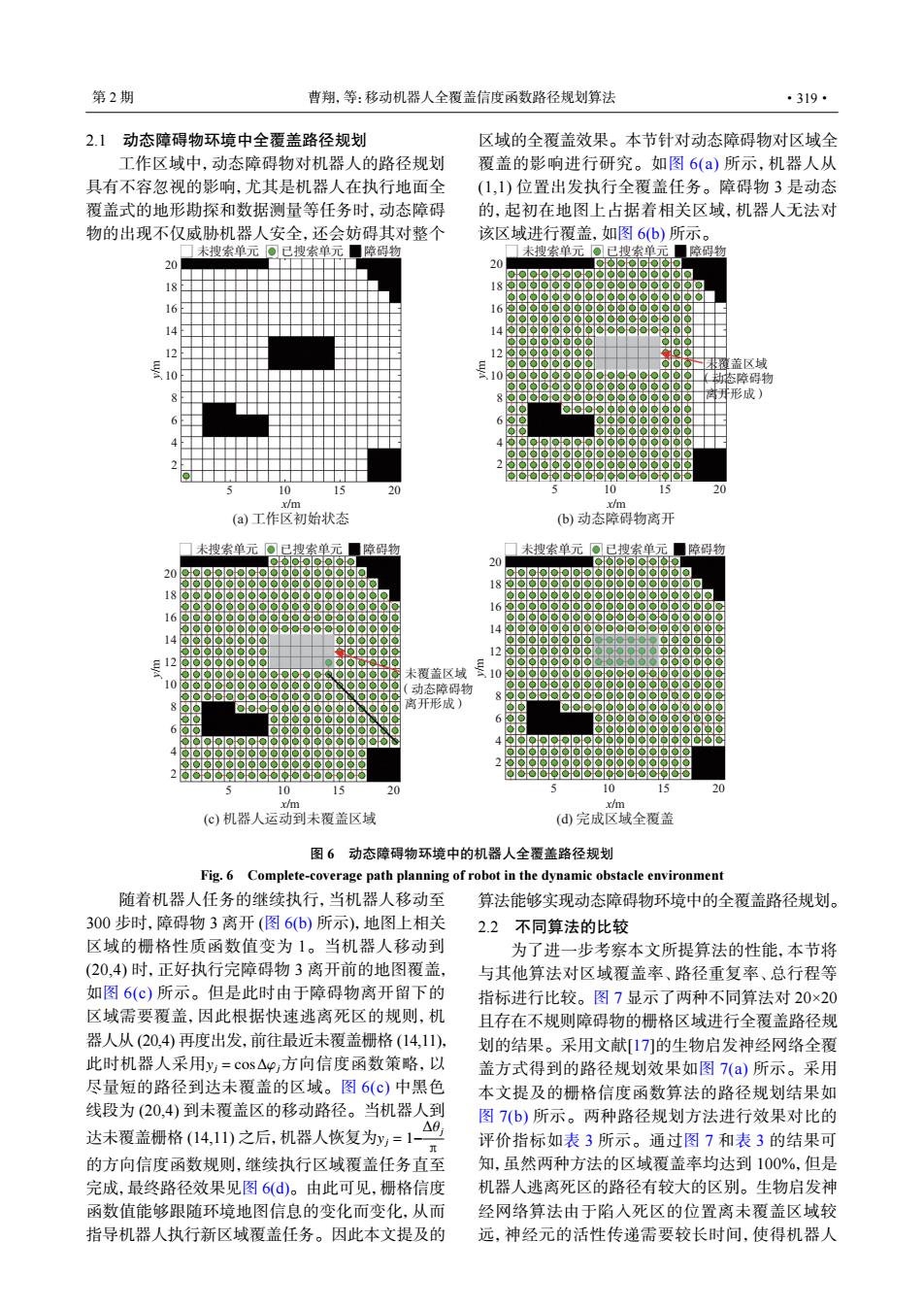
第2期 曹翔,等:移动机器人全覆盖信度函数路径规划算法 ·319· 2.1 动态障碍物环境中全覆盖路径规划 区域的全覆盖效果。本节针对动态障碍物对区域全 工作区域中,动态障碍物对机器人的路径规划 覆盖的影响进行研究。如图6(a)所示,机器人从 具有不容忽视的影响,尤其是机器人在执行地面全 (1,1)位置出发执行全覆盖任务。障碍物3是动态 覆盖式的地形勘探和数据测量等任务时,动态障碍 的,起初在地图上占据着相关区域,机器人无法对 物的出现不仅威胁机器人安全,还会妨碍其对整个 该区域进行覆盖,如图6(b)所示。 未搜索单元▣已搜索单元■障碍物 未搜索单元©已搜索单元■障碍物 20 20 18 18 16 16 14 14 2 盖区域 .10 疮障碍物 开形成) 0 15 20 10 15 x/m x/m (a)工作区初始状态 (b)动态障碍物离开 未搜索单元。已搜索单元■障碍物 未搜索单元。已搜索单元 ■障碍物 20 18 18 ● 16 6 14 12 未覆盖区域 10 动态障碍物 离开形成) 10 15 20 5 10 15 20 x/m x/m (©)机器人运动到未覆盖区域 (d)完成区域全覆盖 图6动态障碍物环境中的机器人全覆盖路径规划 Fig.6 Complete-coverage path planning of robot in the dynamic obstacle environment 随着机器人任务的继续执行,当机器人移动至 算法能够实现动态障碍物环境中的全覆盖路径规划。 300步时,障碍物3离开(图6(b)所示),地图上相关 2.2不同算法的比较 区域的栅格性质函数值变为1。当机器人移动到 为了进一步考察本文所提算法的性能,本节将 (20,4)时,正好执行完障碍物3离开前的地图覆盖, 与其他算法对区域覆盖率、路径重复率、总行程等 如图6(c)所示。但是此时由于障碍物离开留下的 指标进行比较。图7显示了两种不同算法对20×20 区域需要覆盖,因此根据快速逃离死区的规则,机 且存在不规则障碍物的栅格区域进行全覆盖路径规 器人从(20,4)再度出发,前往最近未覆盖栅格(14,11), 划的结果。采用文献[17]的生物启发神经网络全覆 此时机器人采用y=cos△p,方向信度函数策略,以 盖方式得到的路径规划效果如图7(a)所示。采用 尽量短的路径到达未覆盖的区域。图6(c)中黑色 本文提及的栅格信度函数算法的路径规划结果如 线段为(20,4)到未覆盖区的移动路径。当机器人到 图7(b)所示。两种路径规划方法进行效果对比的 达未覆盖栅格(14,1山)之后,机器人恢复为,=1A 评价指标如表3所示。通过图7和表3的结果可 的方向信度函数规则,继续执行区域覆盖任务直至 知,虽然两种方法的区域覆盖率均达到100%,但是 完成,最终路径效果见图6()。由此可见,栅格信度 机器人逃离死区的路径有较大的区别。生物启发神 函数值能够跟随环境地图信息的变化而变化,从而 经网络算法由于陷入死区的位置离未覆盖区域较 指导机器人执行新区域覆盖任务。因此本文提及的 远,神经元的活性传递需要较长时间,使得机器人2.1 动态障碍物环境中全覆盖路径规划 工作区域中,动态障碍物对机器人的路径规划 具有不容忽视的影响,尤其是机器人在执行地面全 覆盖式的地形勘探和数据测量等任务时,动态障碍 物的出现不仅威胁机器人安全,还会妨碍其对整个 区域的全覆盖效果。本节针对动态障碍物对区域全 覆盖的影响进行研究。如图 6(a) 所示,机器人从 (1,1) 位置出发执行全覆盖任务。障碍物 3 是动态 的,起初在地图上占据着相关区域,机器人无法对 该区域进行覆盖,如图 6(b) 所示。 yj = cos∆φj yj = 1− ∆θj π 随着机器人任务的继续执行,当机器人移动至 300 步时,障碍物 3 离开 (图 6(b) 所示),地图上相关 区域的栅格性质函数值变为 1。当机器人移动到 (20,4) 时,正好执行完障碍物 3 离开前的地图覆盖, 如图 6(c) 所示。但是此时由于障碍物离开留下的 区域需要覆盖,因此根据快速逃离死区的规则,机 器人从 (20,4) 再度出发,前往最近未覆盖栅格 (14,11), 此时机器人采用 方向信度函数策略,以 尽量短的路径到达未覆盖的区域。图 6(c) 中黑色 线段为 (20,4) 到未覆盖区的移动路径。当机器人到 达未覆盖栅格 (14,11) 之后,机器人恢复为 的方向信度函数规则,继续执行区域覆盖任务直至 完成,最终路径效果见图 6(d)。由此可见,栅格信度 函数值能够跟随环境地图信息的变化而变化,从而 指导机器人执行新区域覆盖任务。因此本文提及的 算法能够实现动态障碍物环境中的全覆盖路径规划。 2.2 不同算法的比较 为了进一步考察本文所提算法的性能,本节将 与其他算法对区域覆盖率、路径重复率、总行程等 指标进行比较。图 7 显示了两种不同算法对 20×20 且存在不规则障碍物的栅格区域进行全覆盖路径规 划的结果。采用文献[17]的生物启发神经网络全覆 盖方式得到的路径规划效果如图 7(a) 所示。采用 本文提及的栅格信度函数算法的路径规划结果如 图 7(b) 所示。两种路径规划方法进行效果对比的 评价指标如表 3 所示。通过图 7 和表 3 的结果可 知,虽然两种方法的区域覆盖率均达到 100%,但是 机器人逃离死区的路径有较大的区别。生物启发神 经网络算法由于陷入死区的位置离未覆盖区域较 远,神经元的活性传递需要较长时间,使得机器人 (a) ҈ࡦ⟣݉ᔭ 20 18 16 14 12 10 8 6 4 2 5 10 15 20 ᱖᥈㉎ٯࢁ ጞ᥈㉎ٯࢁ 䯈ⶹ➕ y/m x/m 20 18 16 14 12 10 8 6 4 2 (c) ᱦஔϦ䓼ݜߔ᱖㺲Ⰲࡦഋ ᱖᥈㉎ٯࢁ ጞ᥈㉎ٯࢁ 䯈ⶹ➕ 5 10 15 20 ᱖㺲Ⰲࡦഋ 喋ߔᔭ䯈ⶹ➕ ⻧ᐬᒎ喌 y/m x/m (d) Ⴘࡦഋڔ㺲Ⰲ ᱖᥈㉎ٯࢁ ጞ᥈㉎ٯࢁ 䯈ⶹ➕ 20 18 16 14 12 10 8 6 4 2 5 10 15 20 y/m x/m 20 18 16 14 12 10 8 6 4 2 (b) ߔᔭ䯈ⶹ➕⻧ᐬ 5 10 15 20 ᱖᥈㉎ٯࢁ ጞ᥈㉎ٯࢁ 䯈ⶹ➕ ᱖㺲Ⰲࡦഋ 喋ߔᔭ䯈ⶹ➕ ⻧ᐬᒎ喌 y/m x/m 图 6 动态障碍物环境中的机器人全覆盖路径规划 Fig. 6 Complete-coverage path planning of robot in the dynamic obstacle environment 第 2 期 曹翔,等:移动机器人全覆盖信度函数路径规划算法 ·319·