正在加载图片...
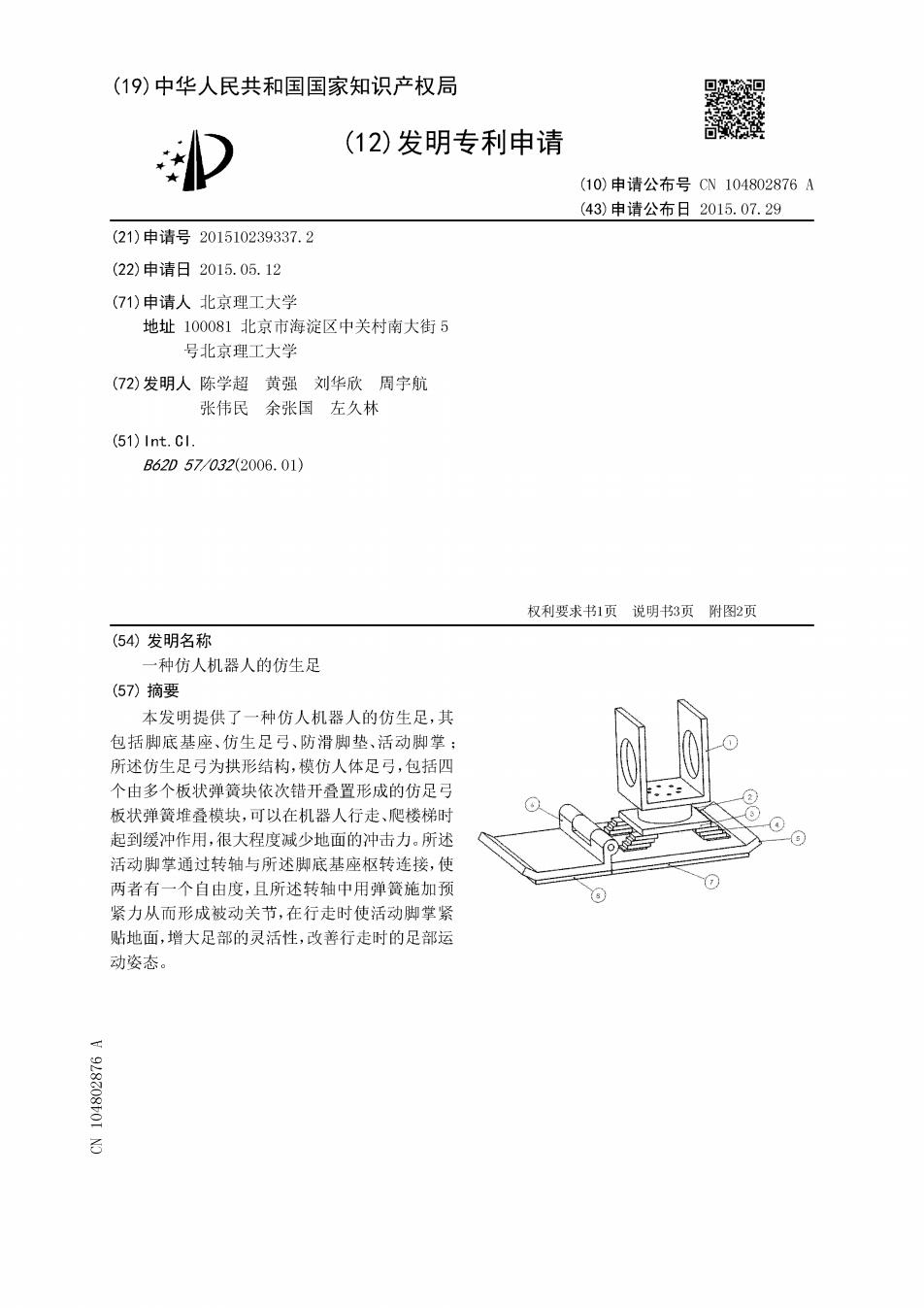
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104802876A (43)申请公布日2015.07.29 (21)申请号201510239337.2 (22)申请日2015.05.12 (71)申请人北京理工大学 地址100081北京市海淀区中关村南大街5 号北京理工大学 (72)发明人陈学超黄强刘华欣周宇航 张伟民余张国左久林 (51)1nt.Cl. B62D57032(2006.01) 权利要求书1页说明书3页附图2页 (54)发明名称 一种仿人机器人的仿生足 (57)摘要 本发明提供了一种仿人机器人的仿生足,其 包括脚底基座、仿生足弓、防滑脚垫、活动脚掌: 所述仿生足弓为拱形结构,模仿人体足弓,包括四 个由多个板状弹簧块依次错开叠置形成的仿足弓 板状弹簧堆叠模块,可以在机器人行走、爬楼梯时 起到缓冲作用,很大程度减少地面的冲击力。所述 活动脚掌通过转轴与所述脚底基座枢转连接,使 两者有一个自由度,且所述转轴中用弹簧施加预 紧力从而形成被动关节,在行走时使活动脚掌紧 贴地面,增大足部的灵活性,改善行走时的足部运 动姿态