正在加载图片...
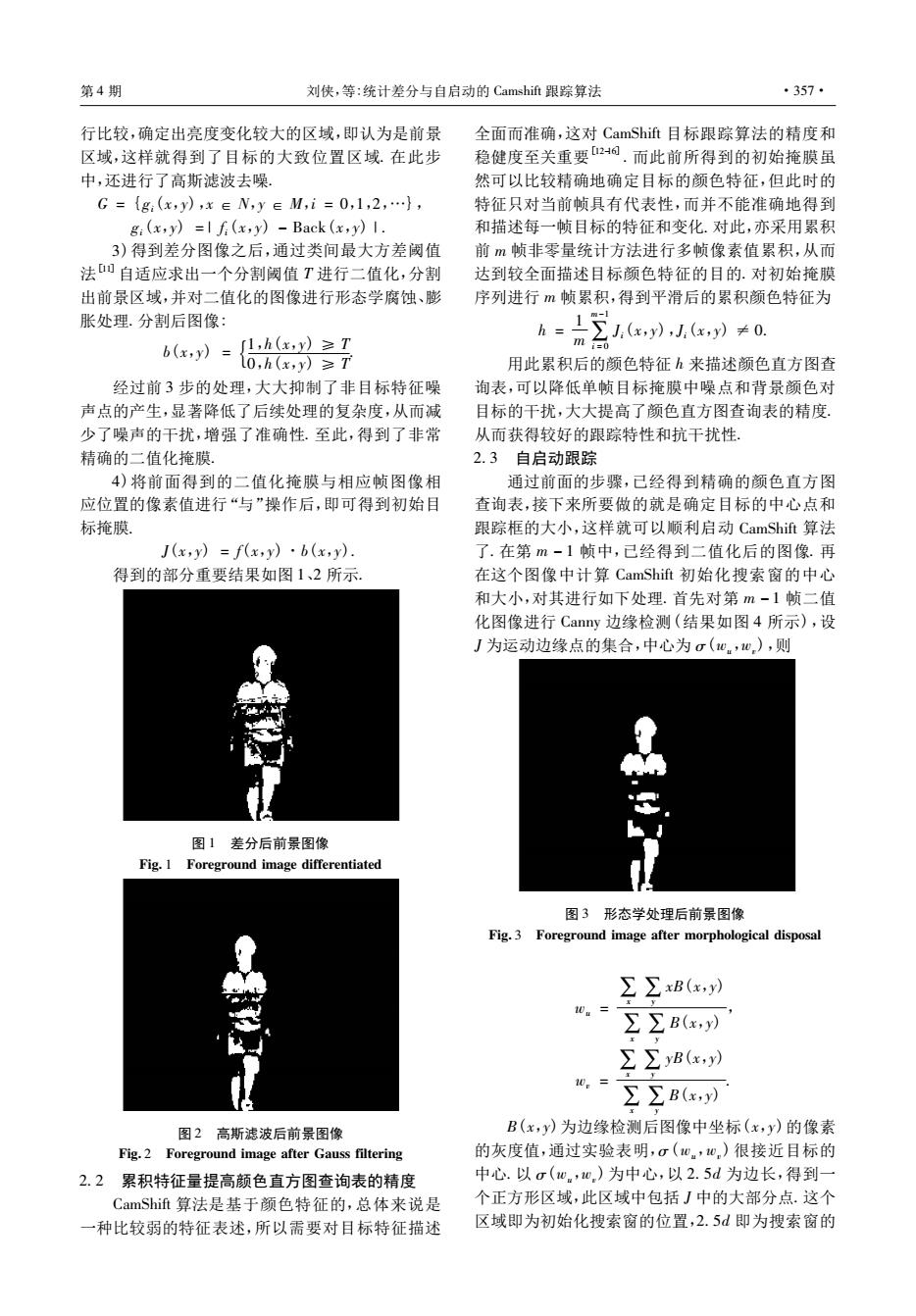
第4期 刘侠,等:统计差分与自启动的Camshift跟踪算法 ·357· 行比较,确定出亮度变化较大的区域,即认为是前景 全面而准确,这对CamShift目标跟踪算法的精度和 区域,这样就得到了目标的大致位置区域.在此步 稳健度至关重要.而此前所得到的初始掩膜虽 中,还进行了高斯滤波去噪 然可以比较精确地确定目标的颜色特征,但此时的 G={g:(x,y),x∈N,y∈M,i=0,1,2,…}, 特征只对当前帧具有代表性,而并不能准确地得到 g:(x,y)=|f(x,y)-Back(x,y)1. 和描述每一帧目标的特征和变化.对此,亦采用累积 3)得到差分图像之后,通过类间最大方差阈值 前m帧非零量统计方法进行多帧像素值累积,从而 法自适应求出一个分割阈值T进行二值化,分割 达到较全面描述目标颜色特征的目的.对初始掩膜 出前景区域,并对二值化的图像进行形态学腐蚀、膨 序列进行m帧累积,得到平滑后的累积颜色特征为 胀处理.分割后图像: b(x,y)=,h(x,y)≥T h=12J,(x)1x)≠0 m i=0 l0,h(x,y)≥T 用此累积后的颜色特征h来描述颜色直方图查 经过前3步的处理,大大抑制了非目标特征噪 询表,可以降低单帧目标掩膜中噪点和背景颜色对 声点的产生,显著降低了后续处理的复杂度,从而减 目标的干扰,大大提高了颜色直方图查询表的精度. 少了噪声的干扰,增强了准确性.至此,得到了非常 从而获得较好的跟踪特性和抗干扰性, 精确的二值化掩膜. 2.3自启动跟踪 4)将前面得到的二值化掩膜与相应帧图像相 通过前面的步骤,已经得到精确的颜色直方图 应位置的像素值进行“与”操作后,即可得到初始目 查询表,接下来所要做的就是确定目标的中心点和 标掩膜, 跟踪框的大小,这样就可以顺利启动CamShift算法 J(x,y)=f(x,y)·b(x,y). 了.在第m-1帧中,己经得到二值化后的图像.再 得到的部分重要结果如图1、2所示. 在这个图像中计算CamShift初始化搜索窗的中心 和大小,对其进行如下处理.首先对第m-1帧二值 化图像进行Canny边缘检测(结果如图4所示),设 J为运动边缘点的集合,中心为σ(0。,w,),则 图1差分后前景图像 Fig.1 Foreground image differentiated 图3形态学处理后前景图像 Fig.3 Foreground image after morphological disposal ∑∑xB(x,) 10u= ∑∑B(x,y) ∑∑B(x》 10。= ∑∑B(x,) 图2高斯滤波后前景图像 B(x,y)为边缘检测后图像中坐标(x,y)的像素 Fig.2 Foreground image after Gauss filtering 的灰度值,通过实验表明,σ(w,w)很接近目标的 2.2累积特征量提高颜色直方图查询表的精度 中心.以σ(w,0,)为中心,以2.5d为边长,得到一 CamShift算法是基于颜色特征的,总体来说是 个正方形区域,此区域中包括J中的大部分点.这个 ~种比较弱的特征表述,所以需要对目标特征描述 区域即为初始化搜索窗的位置,2.5d即为搜索窗的行比较,确定出亮度变化较大的区域,即认为是前景 区域,这样就得到了目标的大致位置区域. 在此步 中,还进行了高斯滤波去噪. G = { gi ( x,y) ,x ∈ N,y ∈ M,i = 0,1,2,…} , gi ( x,y) = | fi ( x,y) - Back( x,y) | . 3) 得到差分图像之后,通过类间最大方差阈值 法[11]自适应求出一个分割阈值 T 进行二值化,分割 出前景区域,并对二值化的图像进行形态学腐蚀、膨 胀处理. 分割后图像: b( x,y) = 1,h( x,y) ≥ T 0,h( x,y) ≥ { T . 经过前 3 步的处理,大大抑制了非目标特征噪 声点的产生,显著降低了后续处理的复杂度,从而减 少了噪声的干扰,增强了准确性. 至此,得到了非常 精确的二值化掩膜. 4) 将前面得到的二值化掩膜与相应帧图像相 应位置的像素值进行“与”操作后,即可得到初始目 标掩膜. J( x,y) = f( x,y) ·b( x,y) . 得到的部分重要结果如图 1、2 所示. 图 1 差分后前景图像 Fig. 1 Foreground image differentiated 图 2 高斯滤波后前景图像 Fig. 2 Foreground image after Gauss filtering 2. 2 累积特征量提高颜色直方图查询表的精度 CamShift 算法是基于颜色特征的,总体来说是 一种比较弱的特征表述,所以需要对目标特征描述 全面而准确,这对 CamShift 目标跟踪算法的精度和 稳健度至关重要[12-16]. 而此前所得到的初始掩膜虽 然可以比较精确地确定目标的颜色特征,但此时的 特征只对当前帧具有代表性,而并不能准确地得到 和描述每一帧目标的特征和变化. 对此,亦采用累积 前 m 帧非零量统计方法进行多帧像素值累积,从而 达到较全面描述目标颜色特征的目的. 对初始掩膜 序列进行 m 帧累积,得到平滑后的累积颜色特征为 h = 1 m∑ m-1 i = 0 Ji ( x,y) ,Ji ( x,y) ≠ 0. 用此累积后的颜色特征 h 来描述颜色直方图查 询表,可以降低单帧目标掩膜中噪点和背景颜色对 目标的干扰,大大提高了颜色直方图查询表的精度. 从而获得较好的跟踪特性和抗干扰性. 2. 3 自启动跟踪 通过前面的步骤,已经得到精确的颜色直方图 查询表,接下来所要做的就是确定目标的中心点和 跟踪框的大小,这样就可以顺利启动 CamShift 算法 了. 在第 m - 1 帧中,已经得到二值化后的图像. 再 在这个图像中计算 CamShift 初始化搜索窗的中心 和大小,对其进行如下处理. 首先对第 m - 1 帧二值 化图像进行 Canny 边缘检测( 结果如图 4 所示) ,设 J 为运动边缘点的集合,中心为 σ( wu,wv) ,则 图 3 形态学处理后前景图像 Fig. 3 Foreground image after morphological disposal wu = ∑x ∑y xB( x,y) ∑x ∑y B( x,y) , wv = ∑x ∑y yB( x,y) ∑x ∑y B( x,y) . B( x,y) 为边缘检测后图像中坐标( x,y) 的像素 的灰度值,通过实验表明,σ( wu,wv ) 很接近目标的 中心. 以 σ( wu,wv) 为中心,以 2. 5d 为边长,得到一 个正方形区域,此区域中包括 J 中的大部分点. 这个 区域即为初始化搜索窗的位置,2. 5d 即为搜索窗的 第 4 期 刘侠,等: 统计差分与自启动的 Camshift 跟踪算法 ·357·