正在加载图片...
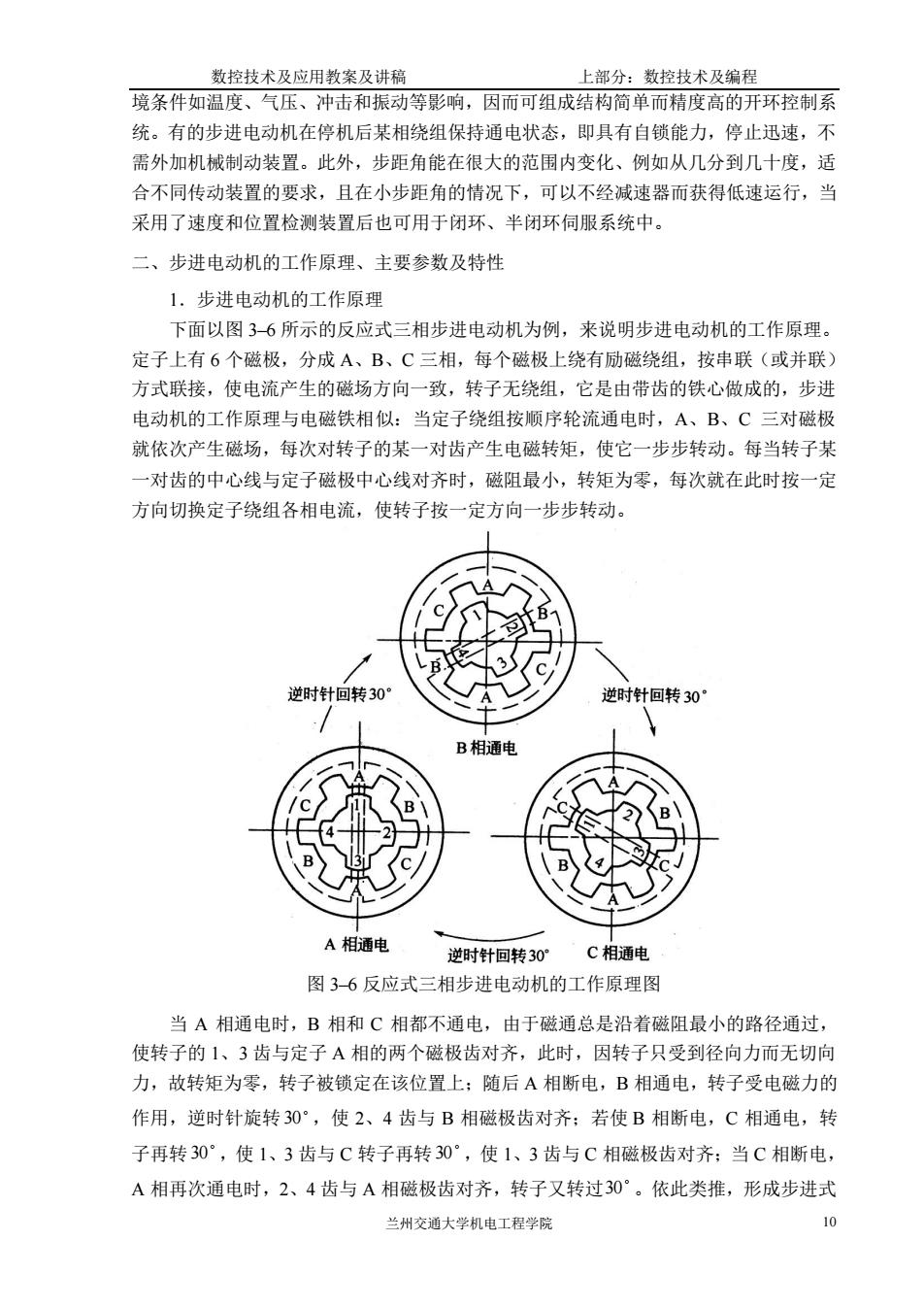
数控技术及应用教案及讲稿 上部分:数控技术及编程 境条件如温度、气压、冲击和振动等影响,因而可组成结构简单而精度高的开环控制系 统。有的步进电动机在停机后某相绕组保持通电状态,即具有自锁能力,停止迅速,不 需外加机械制动装置。此外,步距角能在很大的范围内变化、例如从几分到几十度,适 合不同传动装置的要求,且在小步距角的情况下,可以不经减速器而获得低速运行,当 采用了速度和位置检测装置后也可用于闭环、半闭环伺服系统中。 二、步进电动机的工作原理、主要参数及特性 1.步进电动机的工作原理 下面以图36所示的反应式三相步进电动机为例,来说明步进电动机的工作原理。 定子上有6个磁极,分成A、B、C三相,每个磁极上绕有励磁绕组,按串联(或并联) 方式联接,使电流产生的磁场方向一致,转子无绕组,它是由带齿的铁心做成的,步进 电动机的工作原理与电磁铁相似:当定子绕组按顺序轮流通电时,A、B、C三对磁极 就依次产生磁场,每次对转子的某一对齿产生电磁转矩,使它一步步转动。每当转子某 一对齿的中心线与定子磁极中心线对齐时,磁阻最小,转矩为零,每次就在此时按一定 方向切换定子绕组各相电流,使转子按一定方向一步步转动。 逆时针 回转30 B相通电 A相通电 逆时针同转30° C相通电 图3-6反应式三相步进电动机的工作原理图 当A相通电时,B相和C相都不通电,由于磁通总是沿着磁阻最小的路径通过, 使转子的1、3齿与定子A相的两个磁极齿对齐,此时,因转子只受到径向力而无切向 力,故转矩为零,转子被锁定在该位置上:随后A相断电,B相通电,转子受电磁力的 作用,逆时针旋转30°,使2、4齿与B相磁极齿对齐:若使B相断电,C相通电,转 子再转30°,使1、3齿与C转子再转30°,使1、3齿与C相磁极齿对齐:当C相断电, A相再次通电时,2、4齿与A相磁极齿对齐,转子又转过30°。依此类推,形成步进式 兰州交通大学机电工程学院 10 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 10 境条件如温度、气压、冲击和振动等影响,因而可组成结构简单而精度高的开环控制系 统。有的步进电动机在停机后某相绕组保持通电状态,即具有自锁能力,停止迅速,不 需外加机械制动装置。此外,步距角能在很大的范围内变化、例如从几分到几十度,适 合不同传动装置的要求,且在小步距角的情况下,可以不经减速器而获得低速运行,当 采用了速度和位置检测装置后也可用于闭环、半闭环伺服系统中。 二、步进电动机的工作原理、主要参数及特性 1.步进电动机的工作原理 下面以图 3–6 所示的反应式三相步进电动机为例,来说明步进电动机的工作原理。 定子上有 6 个磁极,分成 A、B、C 三相,每个磁极上绕有励磁绕组,按串联(或并联) 方式联接,使电流产生的磁场方向一致,转子无绕组,它是由带齿的铁心做成的,步进 电动机的工作原理与电磁铁相似:当定子绕组按顺序轮流通电时,A、B、C 三对磁极 就依次产生磁场,每次对转子的某一对齿产生电磁转矩,使它一步步转动。每当转子某 一对齿的中心线与定子磁极中心线对齐时,磁阻最小,转矩为零,每次就在此时按一定 方向切换定子绕组各相电流,使转子按一定方向一步步转动。 图 3–6 反应式三相步进电动机的工作原理图 当 A 相通电时,B 相和 C 相都不通电,由于磁通总是沿着磁阻最小的路径通过, 使转子的 1、3 齿与定子 A 相的两个磁极齿对齐,此时,因转子只受到径向力而无切向 力,故转矩为零,转子被锁定在该位置上;随后 A 相断电,B 相通电,转子受电磁力的 作用,逆时针旋转 30 ,使 2、4 齿与 B 相磁极齿对齐;若使 B 相断电,C 相通电,转 子再转 30 ,使 1、3 齿与 C 转子再转 30 ,使 1、3 齿与 C 相磁极齿对齐;当 C 相断电, A 相再次通电时,2、4 齿与 A 相磁极齿对齐,转子又转过 30 。依此类推,形成步进式