正在加载图片...
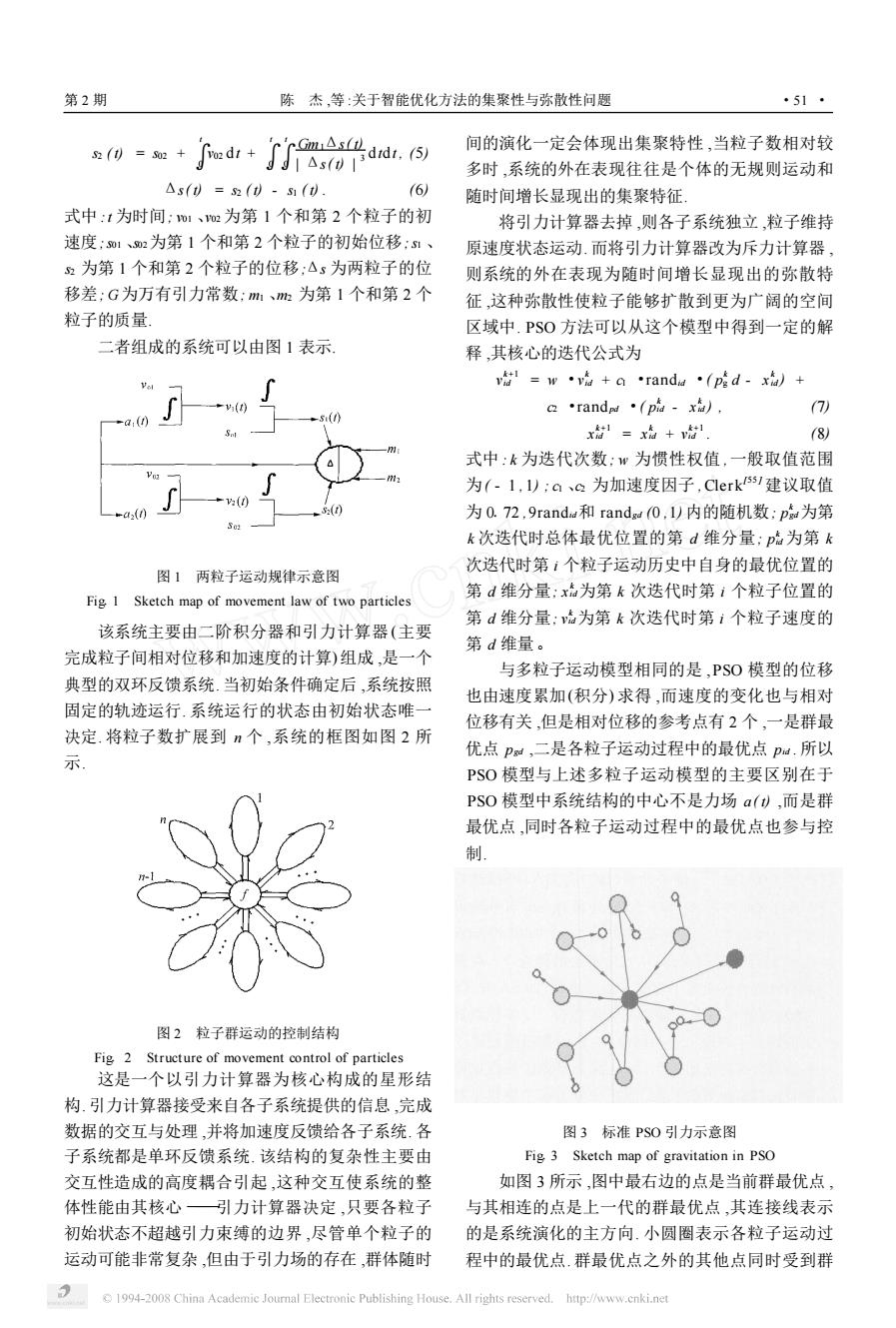
第2期 陈杰,等:关于智能优化方法的集聚性与弥散性问题 ·51· (W=如+md+ 'rGm△sdd,(5) 间的演化一定会体现出集聚特性,当粒子数相对较 gJ△s(3 多时,系统的外在表现往往是个体的无规则运动和 △s()=2(·3() 6) 随时间增长显现出的集聚特征, 式中:1为时间;o1、2为第1个和第2个粒子的初 将引力计算器去掉,则各子系统独立,粒子维持 速度:012为第1个和第2个粒子的初始位移:m、 原速度状态运动.而将引力计算器改为斥力计算器, 为第1个和第2个粒子的位移:△s为两粒子的位 则系统的外在表现为随时间增长显现出的弥散特 移差;G为万有引力常数:m、m为第1个和第2个 征,这种弥散性使粒子能够扩散到更为广阔的空间 粒子的质量 区域中.PSO方法可以从这个模型中得到一定的解 二者组成的系统可以由图1表示 释,其核心的迭代公式为 v格=w·v克+a.rand·(psd-xa)+ a·randp·(pia-xa), 7) x=点+ (8) 式中:k为迭代次数:w为惯性权值,一般取值范围 为(-1,);a、a为加速度因子,Clerks5/建议取值 (1 为0.72,9 rand和randgd0,l)内的随机数:pa为第 k次迭代时总体最优位置的第d维分量;p临为第k 次迭代时第ⅰ个粒子运动历史中自身的最优位置的 图1两粒子运动规律示意图 第d维分量:x为第k次迭代时第1个粒子位置的 Fig I Sketch map of movement law of two particles 第d维分量:为第k次迭代时第i个粒子速度的 该系统主要由二阶积分器和引力计算器(主要 第d维量。 完成粒子间相对位移和加速度的计算)组成,是一个 与多粒子运动模型相同的是,PS0模型的位移 典型的双环反馈系统.当初始条件确定后,系统按照 也由速度累加(积分)求得,而速度的变化也与相对 固定的轨迹运行.系统运行的状态由初始状态唯一 位移有关,但是相对位移的参考点有2个,一是群最 决定.将粒子数扩展到n个,系统的框图如图2所 优点P则,二是各粒子运动过程中的最优点Pa.所以 示 PSO模型与上述多粒子运动模型的主要区别在于 PS0模型中系统结构的中心不是力场a(),而是群 最优点,同时各粒子运动过程中的最优点也参与控 制 图2粒子群运动的控制结构 Fig 2 Structure of movement control of particles 这是一个以引力计算器为核心构成的星形结 构.引力计算器接受来自各子系统提供的信息,完成 数据的交互与处理,并将加速度反馈给各子系统.各 图3标准PSO引力示意图 子系统都是单环反馈系统.该结构的复杂性主要由 Fig 3 Sketch map of gravitation in PSO 交互性造成的高度耦合引起,这种交互使系统的整 如图3所示,图中最右边的点是当前群最优点, 体性能由其核心—引力计算器决定,只要各粒子 与其相连的点是上一代的群最优点,其连接线表示 初始状态不超越引力束缚的边界,尽管单个粒子的 的是系统演化的主方向.小圆圈表示各粒子运动过 运动可能非常复杂,但由于引力场的存在,群体随时 程中的最优点.群最优点之外的其他点同时受到群 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.nets2 ( t) = s02 +∫ t 0 v02 dt +∫ t 0∫ t 0 Gm1Δs( t) | Δs( t) | 3 dtdt , (5) Δs( t) = s2 ( t) - s1 ( t) . (6) 式中 :t 为时间; v01 、v02 为第 1 个和第 2 个粒子的初 速度;s01 、s02为第 1 个和第 2 个粒子的初始位移;s1 、 s2 为第 1 个和第 2 个粒子的位移;Δs 为两粒子的位 移差; G为万有引力常数; m1 、m2 为第 1 个和第 2 个 粒子的质量. 二者组成的系统可以由图 1 表示. 图 1 两粒子运动规律示意图 Fig11 Sketch map of movement law of two particles 该系统主要由二阶积分器和引力计算器 (主要 完成粒子间相对位移和加速度的计算) 组成 ,是一个 典型的双环反馈系统. 当初始条件确定后 ,系统按照 固定的轨迹运行. 系统运行的状态由初始状态唯一 决定. 将粒子数扩展到 n 个 ,系统的框图如图 2 所 示. 图 2 粒子群运动的控制结构 Fig1 2 Structure of movement control of particles 这是一个以引力计算器为核心构成的星形结 构. 引力计算器接受来自各子系统提供的信息 ,完成 数据的交互与处理 ,并将加速度反馈给各子系统. 各 子系统都是单环反馈系统. 该结构的复杂性主要由 交互性造成的高度耦合引起 ,这种交互使系统的整 体性能由其核心 ———引力计算器决定 ,只要各粒子 初始状态不超越引力束缚的边界 ,尽管单个粒子的 运动可能非常复杂 ,但由于引力场的存在 ,群体随时 间的演化一定会体现出集聚特性 ,当粒子数相对较 多时 ,系统的外在表现往往是个体的无规则运动和 随时间增长显现出的集聚特征. 将引力计算器去掉 ,则各子系统独立 ,粒子维持 原速度状态运动. 而将引力计算器改为斥力计算器 , 则系统的外在表现为随时间增长显现出的弥散特 征 ,这种弥散性使粒子能够扩散到更为广阔的空间 区域中. PSO 方法可以从这个模型中得到一定的解 释 ,其核心的迭代公式为 v k+1 id = w ·v k id + c1 ·randid ·( p k g d - x k id ) + c2 ·randpd ·( p k id - x k id ) , (7) x k+1 id = x k id + v k+1 id . (8) 式中 : k 为迭代次数; w 为惯性权值 ,一般取值范围 为( - 1 , 1) ; c1 、c2 为加速度因子 ,Clerk [55 ] 建议取值 为 0172 ,9randid和 randgd (0 ,1) 内的随机数; p k gd为第 k 次迭代时总体最优位置的第 d 维分量; p k id 为第 k 次迭代时第 i 个粒子运动历史中自身的最优位置的 第 d 维分量; x k id为第 k 次迭代时第 i 个粒子位置的 第 d 维分量; v k id为第 k 次迭代时第 i 个粒子速度的 第 d 维量。 与多粒子运动模型相同的是 ,PSO 模型的位移 也由速度累加(积分) 求得 ,而速度的变化也与相对 位移有关 ,但是相对位移的参考点有 2 个 ,一是群最 优点 pgd ,二是各粒子运动过程中的最优点 pid . 所以 PSO 模型与上述多粒子运动模型的主要区别在于 PSO 模型中系统结构的中心不是力场 a( t) ,而是群 最优点 ,同时各粒子运动过程中的最优点也参与控 制. 图 3 标准 PSO 引力示意图 Fig13 Sketch map of gravitation in PSO 如图 3 所示 ,图中最右边的点是当前群最优点 , 与其相连的点是上一代的群最优点 ,其连接线表示 的是系统演化的主方向. 小圆圈表示各粒子运动过 程中的最优点. 群最优点之外的其他点同时受到群 第 2 期 陈 杰 ,等 :关于智能优化方法的集聚性与弥散性问题 · 15 ·