正在加载图片...
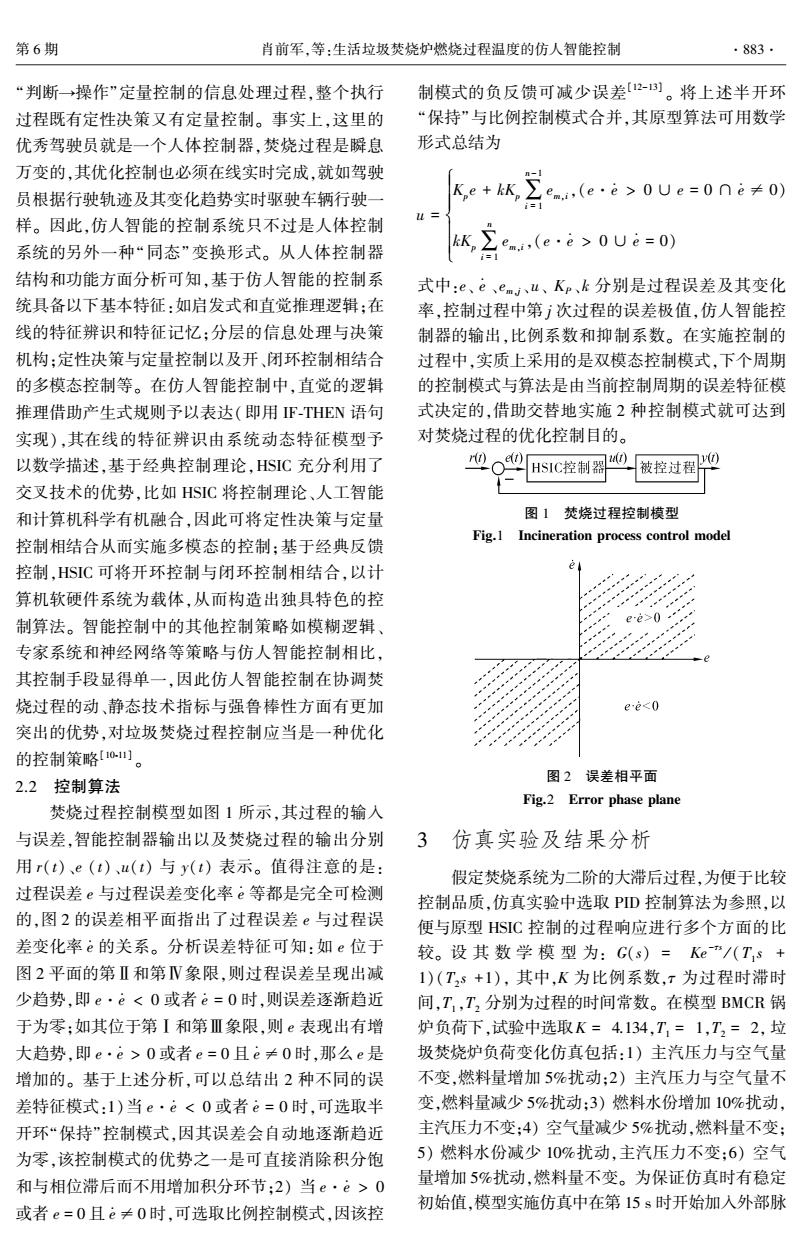
第6期 肖前军,等:生活垃圾焚烧炉燃烧过程温度的仿人智能控制 ·883. “判断→操作”定量控制的信息处理过程,整个执行 制模式的负反馈可减少误差2-)。将上述半开环 过程既有定性决策又有定量控制。事实上,这里的 “保持”与比例控制模式合并,其原型算法可用数学 优秀驾驶员就是一个人体控制器,焚烧过程是瞬息 形式总结为 万变的,其优化控制也必须在线实时完成,就如驾驶 员根据行驶轨迹及其变化趋势实时驱驶车辆行驶一 em.i,(e·e>0Ue=0ne≠0) i=1 样。因此,仿人智能的控制系统只不过是人体控制 系统的另外一种“同态”变换形式。从人体控制器 (=0) i=1 结构和功能方面分析可知,基于仿人智能的控制系 式中:e、e、emu、Kp、k分别是过程误差及其变化 统具备以下基本特征:如启发式和直觉推理逻辑:在 率,控制过程中第j次过程的误差极值,仿人智能控 线的特征辨识和特征记忆:分层的信息处理与决策 制器的输出,比例系数和抑制系数。在实施控制的 机构:定性决策与定量控制以及开、闭环控制相结合 过程中,实质上采用的是双模态控制模式,下个周期 的多模态控制等。在仿人智能控制中,直觉的逻辑 的控制模式与算法是由当前控制周期的误差特征模 推理借助产生式规则予以表达(即用F-THEN语句 式决定的,借助交替地实施2种控制模式就可达到 实现),其在线的特征辨识由系统动态特征模型予 对焚烧过程的优化控制目的。 以数学描述,基于经典控制理论,HSIC充分利用了 ) et) HS1C控制器0 被控过程 v) 交叉技术的优势,比如HSIC将控制理论、人工智能 和计算机科学有机融合,因此可将定性决策与定量 图1焚烧过程控制模型 Fig.I 控制相结合从而实施多模态的控制:基于经典反馈 Incineration process control model 控制,HSIC可将开环控制与闭环控制相结合,以计 el 算机软硬件系统为载体,从而构造出独具特色的控 制算法。智能控制中的其他控制策略如模糊逻辑、 ee>0 专家系统和神经网络等策略与仿人智能控制相比, e 其控制手段显得单一,因此仿人智能控制在协调焚 烧过程的动、静态技术指标与强鲁棒性方面有更加 ee<o 突出的优势,对垃圾焚烧过程控制应当是一种优化 的控制策略1)。 2.2控制算法 图2误差相平面 Fig.2 Error phase plane 焚烧过程控制模型如图1所示,其过程的输入 与误差,智能控制器输出以及焚烧过程的输出分别 仿真实验及结果分析 用r(t)、e(t)、u(t)与y(t)表示。值得注意的是: 假定焚烧系统为二阶的大滞后过程,为便于比较 过程误差e与过程误差变化率e等都是完全可检测 控制品质,仿真实验中选取PD控制算法为参照,以 的,图2的误差相平面指出了过程误差e与过程误 便与原型HSIC控制的过程响应进行多个方面的比 差变化率e的关系。分析误差特征可知:如e位于 较。设其数学模型为:G(s)=Ke/(Ts+ 图2平面的第Ⅱ和第N象限,则过程误差呈现出减 1)(T2s+1),其中,K为比例系数,r为过程时滞时 少趋势,即e·e<0或者e=0时,则误差逐渐趋近 间,T,T2分别为过程的时间常数。在模型BMCR锅 于为零:如其位于第I和第Ⅲ象限,则e表现出有增 炉负荷下,试验中选取K=4.134,T,=1,T2=2,垃 大趋势,即e·e>0或者e=0且e≠0时,那么e是 圾焚烧炉负荷变化仿真包括:1)主汽压力与空气量 增加的。基于上述分析,可以总结出2种不同的误 不变,燃料量增加5%扰动:2)主汽压力与空气量不 差特征模式:1)当e·e<0或者e=0时,可选取半 变,燃料量减少5%扰动:3)燃料水份增加10%扰动, 开环“保持”控制模式,因其误差会自动地逐渐趋近 主汽压力不变:4)空气量减少5%扰动,燃料量不变: 为零,该控制模式的优势之一是可直接消除积分饱 5)燃料水份减少10%扰动,主汽压力不变:6)空气 和与相位滞后而不用增加积分环节:2)当e·e>0 量增加5%扰动,燃料量不变。为保证仿真时有稳定 初始值,模型实施仿真中在第15s时开始加入外部脉 或者e=0且e≠0时,可选取比例控制模式,因该控“判断→操作”定量控制的信息处理过程,整个执行 过程既有定性决策又有定量控制。 事实上,这里的 优秀驾驶员就是一个人体控制器,焚烧过程是瞬息 万变的,其优化控制也必须在线实时完成,就如驾驶 员根据行驶轨迹及其变化趋势实时驱驶车辆行驶一 样。 因此,仿人智能的控制系统只不过是人体控制 系统的另外一种“同态”变换形式。 从人体控制器 结构和功能方面分析可知,基于仿人智能的控制系 统具备以下基本特征:如启发式和直觉推理逻辑;在 线的特征辨识和特征记忆;分层的信息处理与决策 机构;定性决策与定量控制以及开、闭环控制相结合 的多模态控制等。 在仿人智能控制中,直觉的逻辑 推理借助产生式规则予以表达(即用 IF⁃THEN 语句 实现),其在线的特征辨识由系统动态特征模型予 以数学描述,基于经典控制理论,HSIC 充分利用了 交叉技术的优势,比如 HSIC 将控制理论、人工智能 和计算机科学有机融合,因此可将定性决策与定量 控制相结合从而实施多模态的控制;基于经典反馈 控制,HSIC 可将开环控制与闭环控制相结合,以计 算机软硬件系统为载体,从而构造出独具特色的控 制算法。 智能控制中的其他控制策略如模糊逻辑、 专家系统和神经网络等策略与仿人智能控制相比, 其控制手段显得单一,因此仿人智能控制在协调焚 烧过程的动、静态技术指标与强鲁棒性方面有更加 突出的优势,对垃圾焚烧过程控制应当是一种优化 的控制策略[10⁃11] 。 2.2 控制算法 焚烧过程控制模型如图 1 所示,其过程的输入 与误差,智能控制器输出以及焚烧过程的输出分别 用 r(t)、e (t)、u(t) 与 y(t) 表示。 值得注意的是: 过程误差 e 与过程误差变化率 e · 等都是完全可检测 的,图 2 的误差相平面指出了过程误差 e 与过程误 差变化率 e · 的关系。 分析误差特征可知:如 e 位于 图 2 平面的第Ⅱ和第Ⅳ象限,则过程误差呈现出减 少趋势,即 e·e · < 0 或者 e · = 0 时,则误差逐渐趋近 于为零;如其位于第Ⅰ和第Ⅲ象限,则 e 表现出有增 大趋势,即 e·e · > 0 或者 e = 0 且 e · ≠ 0 时,那么 e 是 增加的。 基于上述分析,可以总结出 2 种不同的误 差特征模式:1)当 e·e · < 0 或者 e · = 0 时,可选取半 开环“保持”控制模式,因其误差会自动地逐渐趋近 为零,该控制模式的优势之一是可直接消除积分饱 和与相位滞后而不用增加积分环节;2) 当 e·e · > 0 或者 e = 0 且 e ·≠0 时,可选取比例控制模式,因该控 制模式的负反馈可减少误差[12-13] 。 将上述半开环 “保持”与比例控制模式合并,其原型算法可用数学 形式总结为 u = Kp e + kKp∑ n-1 i = 1 em,i,(e·e · > 0 ∪ e = 0 ∩ e · ≠ 0) kKp∑ n i = 1 em,i,(e·e · > 0 ∪ e · = 0) ì î í ï ïï ï ï 式中:e、 e · 、em,j、u、 KP 、k 分别是过程误差及其变化 率,控制过程中第 j 次过程的误差极值,仿人智能控 制器的输出,比例系数和抑制系数。 在实施控制的 过程中,实质上采用的是双模态控制模式,下个周期 的控制模式与算法是由当前控制周期的误差特征模 式决定的,借助交替地实施 2 种控制模式就可达到 对焚烧过程的优化控制目的。 图 1 焚烧过程控制模型 Fig.1 Incineration process control model 图 2 误差相平面 Fig.2 Error phase plane 3 仿真实验及结果分析 假定焚烧系统为二阶的大滞后过程,为便于比较 控制品质,仿真实验中选取 PID 控制算法为参照,以 便与原型 HSIC 控制的过程响应进行多个方面的比 较。 设 其 数 学 模 型 为: G(s) = Ke -τs / (T1 s + 1)(T2 s +1), 其中,K 为比例系数,τ 为过程时滞时 间,T1 ,T2 分别为过程的时间常数。 在模型 BMCR 锅 炉负荷下,试验中选取K = 4.134,T1 = 1,T2 = 2, 垃 圾焚烧炉负荷变化仿真包括:1) 主汽压力与空气量 不变,燃料量增加 5%扰动;2) 主汽压力与空气量不 变,燃料量减少 5%扰动;3) 燃料水份增加 10%扰动, 主汽压力不变;4) 空气量减少 5%扰动,燃料量不变; 5) 燃料水份减少 10%扰动,主汽压力不变;6) 空气 量增加 5%扰动,燃料量不变。 为保证仿真时有稳定 初始值,模型实施仿真中在第 15 s 时开始加入外部脉 第 6 期 肖前军,等:生活垃圾焚烧炉燃烧过程温度的仿人智能控制 ·883·