正在加载图片...
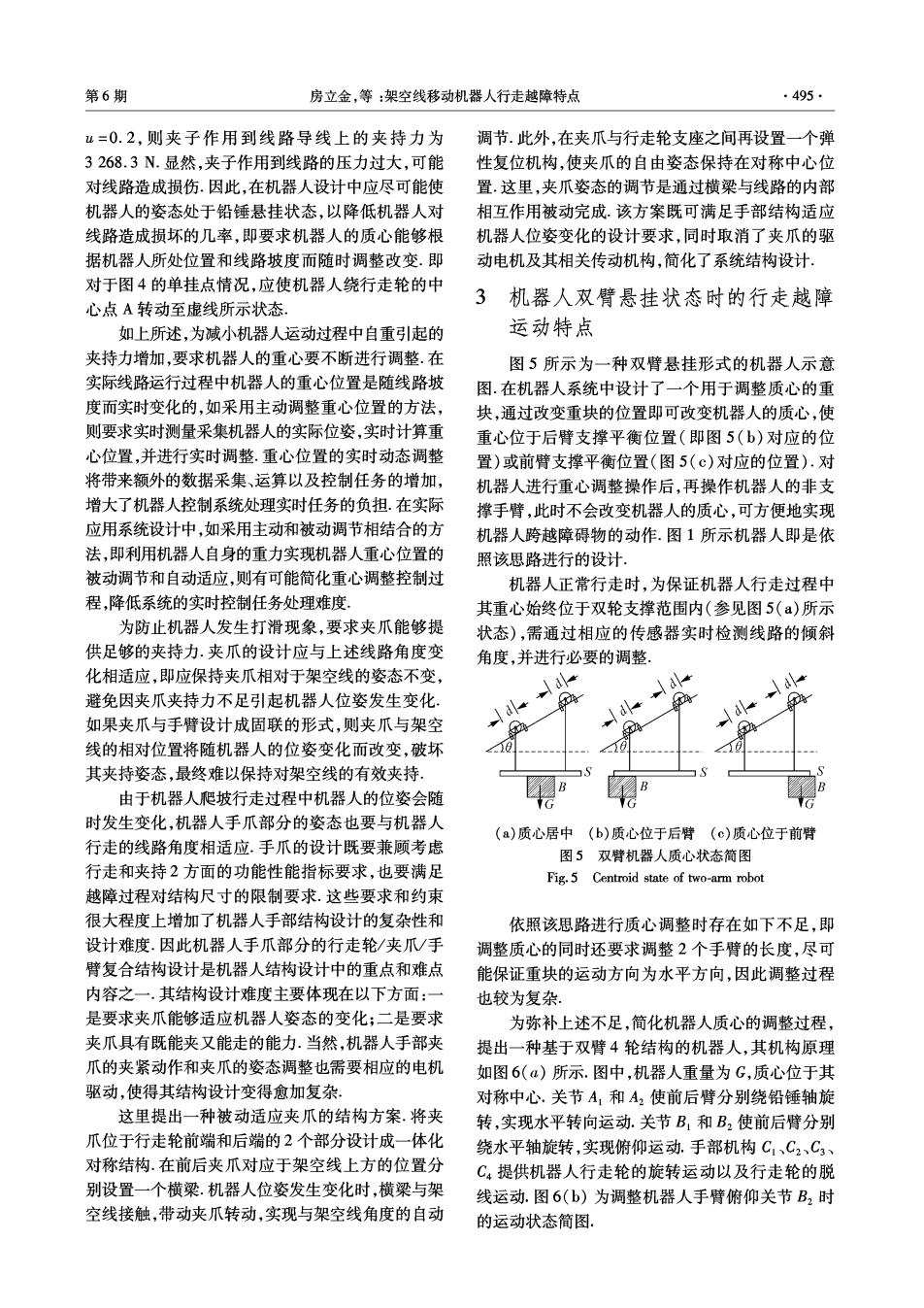
第6期 房立金,等:架空线移动机器人行走越障特点 ·495 “=0.2,则夹子作用到线路导线上的夹持力为 调节.此外,在夹爪与行走轮支座之间再设置一个弹 3268.3N.显然,夹子作用到线路的压力过大,可能 性复位机构,使夹爪的自由姿态保持在对称中心位 对线路造成损伤.因此,在机器人设计中应尽可能使 置这里,夹爪姿态的调节是通过横梁与线路的内部 机器人的姿态处于铅锤悬挂状态,以降低机器人对 相互作用被动完成.该方案既可满足手部结构适应 线路造成损坏的几率,即要求机器人的质心能够根 机器人位姿变化的设计要求,同时取消了夹爪的驱 据机器人所处位置和线路坡度而随时调整改变.即 动电机及其相关传动机构,简化了系统结构设计 对于图4的单挂点情况,应使机器人绕行走轮的中 3 机器人双臂悬挂状态时的行走越障 心点A转动至虚线所示状态 如上所述,为减小机器人运动过程中自重引起的 运动特点 夹特力增加,要求机器人的重心要不断进行调整.在 图5所示为一种双臂悬挂形式的机器人示意 实际线路运行过程中机器人的重心位置是随线路坡 图.在机器人系统中设计了一个用于调整质心的重 度而实时变化的,如采用主动调整重心位置的方法, 块,通过改变重块的位置即可改变机器人的质心,使 则要求实时测量采集机器人的实际位姿,实时计算重 重心位于后臂支撑平衡位置(即图5(b)对应的位 心位置,并进行实时调整.重心位置的实时动态调整 置)或前臂支撑平衡位置(图5(c)对应的位置).对 将带来额外的数据采集、运算以及控制任务的增加, 机器人进行重心调整操作后,再操作机器人的非支 增大了机器人控制系统处理实时任务的负担.在实际 撑手臂,此时不会改变机器人的质心,可方便地实现 应用系统设计中,如采用主动和被动调节相结合的方 机器人跨越障碍物的动作.图1所示机器人即是依 法,即利用机器人自身的重力实现机器人重心位置的 照该思路进行的设计. 被动调节和自动适应,则有可能简化重心调整控制过 机器人正常行走时,为保证机器人行走过程中 程,降低系统的实时控制任务处理难度, 其重心始终位于双轮支撑范围内(参见图5(a)所示 为防止机器人发生打滑现象,要求夹爪能够提 状态),需通过相应的传感器实时检测线路的倾斜 供足够的夹持力.夹爪的设计应与上述线路角度变 角度,并进行必要的调整. 化相适应,即应保持夹爪相对于架空线的姿态不变, 避免因夹爪夹持力不足引起机器人位姿发生变化. 如果夹爪与手臂设计成固联的形式,则夹爪与架空 线的相对位置将随机器人的位姿变化而改变,破坏 其夹持姿态,最终难以保持对架空线的有效夹持, 由于机器人爬坡行走过程中机器人的位姿会随 时发生变化,机器人手爪部分的姿态也要与机器人 (a)质心居中(b)质心位于后臂(c)质心位于前臂 行走的线路角度相适应.手爪的设计既要兼顾考虑 图5双臂机器人质心状态简图 行走和夹持2方面的功能性能指标要求,也要满足 Fig.5 Centroid state of two-arm robot 越障过程对结构尺寸的限制要求.这些要求和约束 很大程度上增加了机器人手部结构设计的复杂性和 依照该思路进行质心调整时存在如下不足,即 设计难度.因此机器人手爪部分的行走轮/夹爪/手 调整质心的同时还要求调整2个手臂的长度,尽可 臂复合结构设计是机器人结构设计中的重点和难点 能保证重块的运动方向为水平方向,因此调整过程 内容之一.其结构设计难度主要体现在以下方面:一 也较为复杂 是要求夹爪能够适应机器人姿态的变化;二是要求 为弥补上述不足,简化机器人质心的调整过程, 夹爪具有既能夹又能走的能力.当然,机器人手部夹 提出一种基于双臂4轮结构的机器人,其机构原理 爪的夹紧动作和夹爪的姿态调整也需要相应的电机 如图6(a)所示.图中,机器人重量为G,质心位于其 驱动,使得其结构设计变得愈加复杂 对称中心.关节A1和A2使前后臂分别绕铅锤轴旋 这里提出一种被动适应夹爪的结构方案.将夹 转,实现水平转向运动.关节B,和B2使前后臂分别 爪位于行走轮前端和后端的2个部分设计成一体化 绕水平轴旋转,实现俯仰运动.手部机构C1、C2、C3、 对称结构.在前后夹爪对应于架空线上方的位置分 C4提供机器人行走轮的旋转运动以及行走轮的脱 别设置一个横梁.机器人位姿发生变化时,横梁与架 线运动.图6(b)为调整机器人手臂俯仰关节B2时 空线接触,带动夹爪转动,实现与架空线角度的自动 的运动状态简图