正在加载图片...
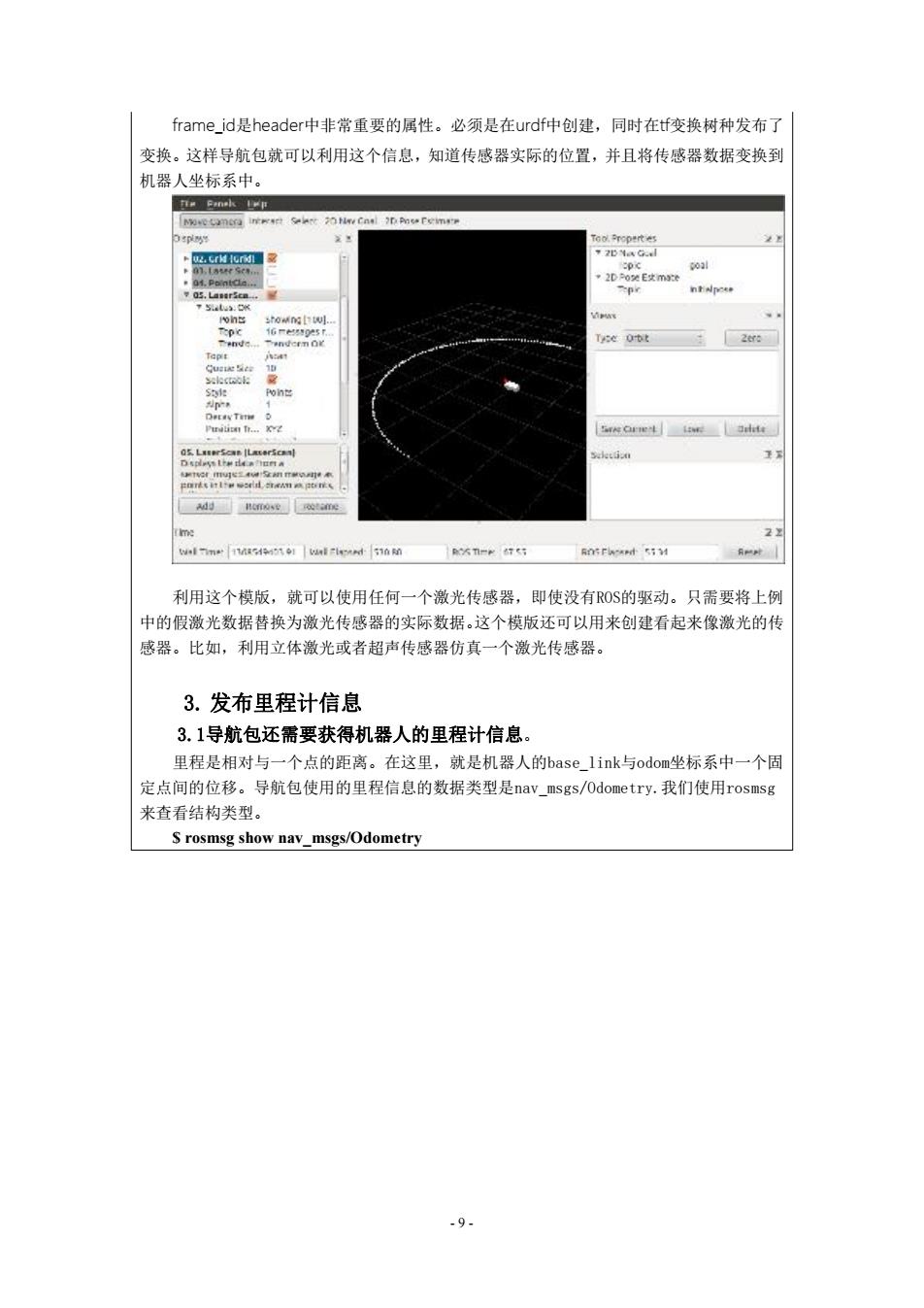
frame_id是header中非常重要的属性。必须是在urdf中创建,同时在tf变换树种发布了 变换。这样导航包就可以利用这个信息,知道传感器实际的位置,并且将传感器数据变换到 机器人坐标系中。 Fn水p 0易 Too.Propertes E +2,crk lur■2 2D Ne Guul coal 01.Pontda... ,2DoeE安m3e 05.Lassrscn.. 了 ntNpete 7 SiLuOK h Tepc 1G=905T. Tnde,下ndcrn0E Tse ott Tapit eat a Style on世 别康 1 DeteyTrte D Q天LaserScan [Laverscan D651eHMh证TA TGtu长4e位nr有 护0tetl#e2 dereAn m pt、 Ad iorrove rootome me 22 wel nmeMwtl Fleed s0M Rosme Rntrwed 5iM 利用这个模版,就可以使用任何一个激光传感器,即使没有OS的驱动。只需要将上例 中的假激光数据替换为激光传感器的实际数据。这个模版还可以用来创建看起来像激光的传 感器。比如,利用立体激光或者超声传感器仿真一个激光传感器。 3.发布里程计信息 3.1导航包还需要获得机器人的里程计信息。 里程是相对与一个点的距离。在这里,就是机器人的base_Iink与odom坐标系中一个固 定点间的位移。导航包使用的里程信息的数据类型是nav_msgs/Odometry.我们使用rosmsg 来查看结构类型。 S rosmsg show nav_msgs/Odometry -9.- 9 - frame_id是header中非常重要的属性。必须是在urdf中创建,同时在tf变换树种发布了 变换。这样导航包就可以利用这个信息,知道传感器实际的位置,并且将传感器数据变换到 机器人坐标系中。 利用这个模版,就可以使用任何一个激光传感器,即使没有ROS的驱动。只需要将上例 中的假激光数据替换为激光传感器的实际数据。这个模版还可以用来创建看起来像激光的传 感器。比如,利用立体激光或者超声传感器仿真一个激光传感器。 3. 发布里程计信息 3.1导航包还需要获得机器人的里程计信息。 里程是相对与一个点的距离。在这里,就是机器人的base_link与odom坐标系中一个固 定点间的位移。导航包使用的里程信息的数据类型是nav_msgs/Odometry.我们使用rosmsg 来查看结构类型。 $ rosmsg show nav_msgs/Odometry