正在加载图片...
50 CHAPTER.UNCERTAINTY AND ROBUSTNESS Then f om Theo,em 2 this holds fo,all admissible A2 iff W.S W2TIll oo< This illust,ates a mo e gene,al point:Robust pe fo.mance with one pe tu bat ion is equivalent to,obust stability with two pe tu,bations,p.ovided that pe,fo mance is in te,ms of the oo no m and the second pe tu bat ion is chosen app op,iately. Robust Command Response Conside,the block diag,am shown in Figue 4.7.Shown ae a plant P and two cont,olle compo Tei Figu,e 4.7:Two deg ee of f eedom cont,olle. nents C.and C2.This is known as a two deg ee of feedom cont,olle because the plant input is allowed to be a function of the two signals r and y independehtly,not just r-y.We will not go into details about such cont,olle so about the app,op,iat nition of inte,nal stability. ne S=一 T:=一S. PC. Then the tansfe,function fomr to y,denoted Tyr,is Tyr PSC.. Let M be a t ansfe,function.ep esenting a model that we want the fo.egoing system to emulate. Denote by e the diffe ence between y and the output of M.The e.o t ansfe,function,that f,om r to e,is Ter =Tur-M=PSC.-M. The ideal choice fo,C.,the one mak ing Tr=0,would the efo,e be M C.=PS This choice may violate the inte nal stability const,aint,but let's suppose that in o,de to continue that it does not (this places some limitations on M). Conside,now a mult iplicative pe,tu bat ion of the plant:P becomes P=(AW2)P,A admissible.Then Ter becomes er PC PC2 -M M PC2 PS -M AW2MS △W2T (afte some algeb,a). CHAPTER UNCERTAINTY AND ROBUSTNESS Then from Theorem this holds for all admissible i kjWSj jWT jk This illustrates a more general point Robust performance with one perturbation is equivalent to robust stability with two perturbations provided that performance is in terms of the norm and the second perturbation is chosen appropriately Robust Command Response Consider the block diagram shown in Figure
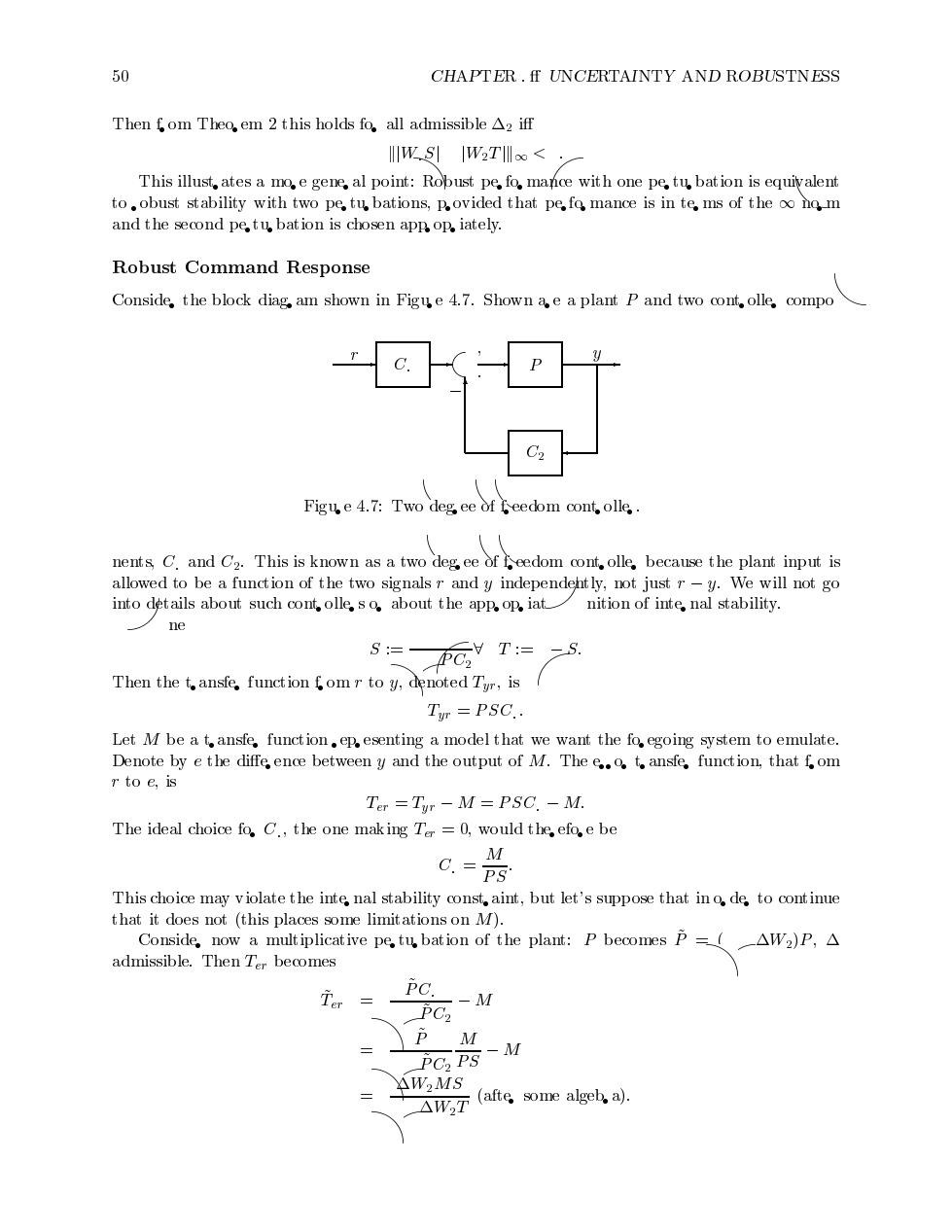
Shown are a plant P and two controller compo C C P r y Figure
Twodegreeoffreedom controller nents C and C This is known as a twodegreeoffreedom controller because the plant input is allowed to be a function of the two signals r and y independently not just r y We will not go into details about such controllers or about the appropriate denition of internal stability Dene S P C T S Then the transfer function from r to y denoted Tyr is Tyr PSC Let M be a transfer function representing a model that we want the foregoing system to emulate Denote by e the dierence between y and the output of M The error transfer function that from r to e is Ter Tyr M PSC M The ideal choice for C the one making Ter would therefore be C M P S This choice may violate the internal stability constraint but let
s suppose that in order to continue that it does not this places some limitations on M Consider now a multiplicative perturbation of the plant P becomes P WP admissible Then Ter becomes T er P C P C M P P C M P S M WM S WT after some algebra����������������������������������������