正在加载图片...
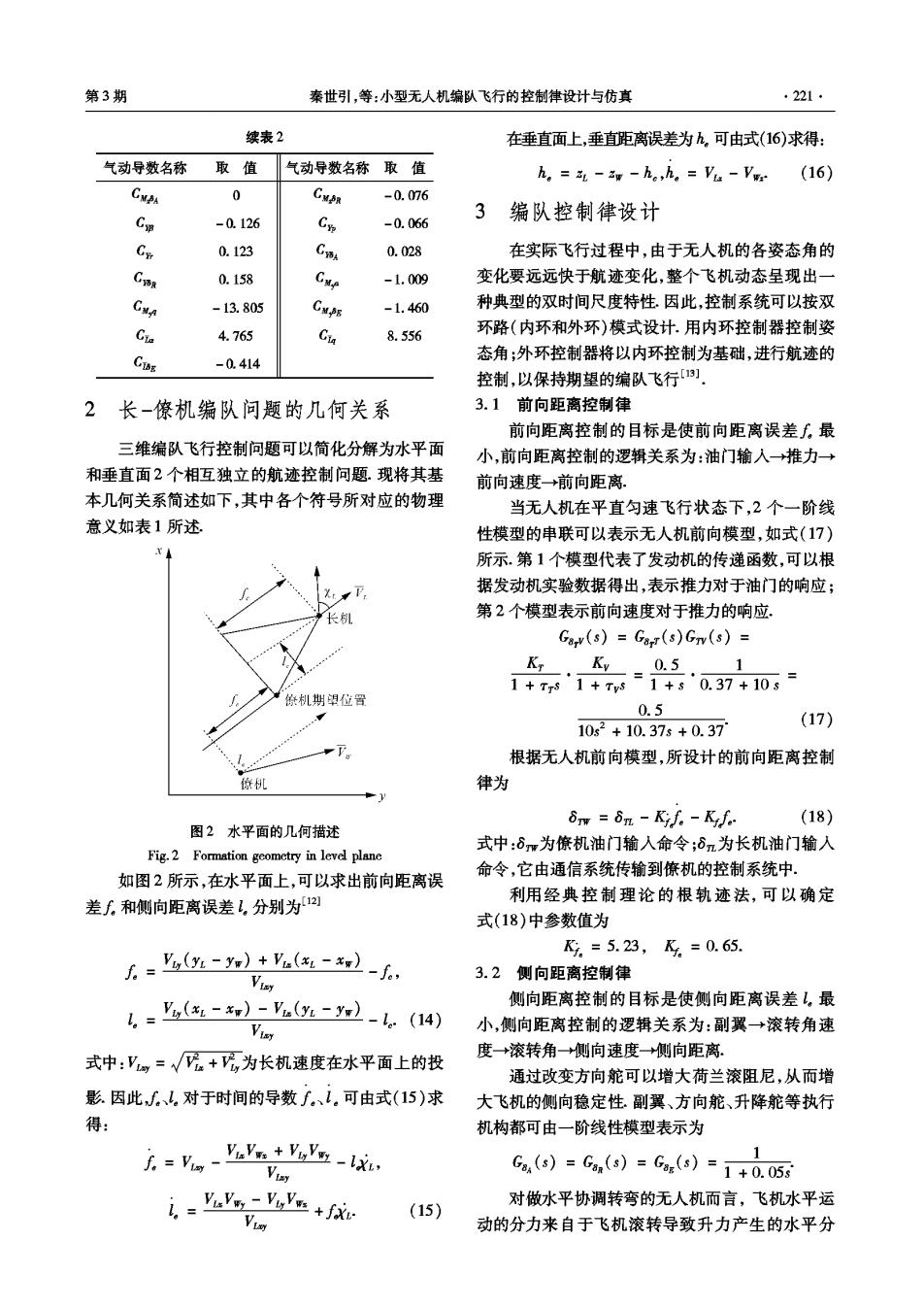
第3期 秦世引,等:小型无人机编队飞行的控制律设计与仿真 .221. 续表2 在垂直面上,垂直距离误差为九,可由式(16)求得: 气动导数名称 取值 气动导数名称取值 h。=-g-h。,h。=Va-Vwr (16) CMPA CMPR -0.076 3 编队控制律设计 Cm -0.126 C -0.066 Cor 0.123 CyA 0.028 在实际飞行过程中,由于无人机的各姿态角的 Cy 0.158 Gxe -1.009 变化要远远快于航迹变化,整个飞机动态呈现出一 A -13.805 CMp部 -1.460 种典型的双时间尺度特性.因此,控制系统可以按双 Cte 4.765 Ci 8.556 环路(内环和外环)模式设计.用内环控制器控制姿 CIE 态角;外环控制器将以内环控制为基础,进行航迹的 -0.414 控制,以保持期望的编队飞行[3 2长-僚机编队问题的几何关系 3.1前向距离控制律 前向距离控制的目标是使前向距离误差。最 三维编队飞行控制问题可以简化分解为水平面 小,前向距离控制的逻辑关系为:油门输入→推力→ 和垂直面2个相互独立的航迹控制问题.现将其基 前向速度→前向距离。 本几何关系简述如下,其中各个符号所对应的物理 当无人机在平直匀速飞行状态下,2个一阶线 意义如表1所述. 性模型的串联可以表示无人机前向模型,如式(17) 所示.第1个模型代表了发动机的传递函数,可以根 据发动机实验数据得出,表示推力对于油门的响应; 第2个模型表示前向速度对于推力的响应。 Gov(s)=Gor(s)Grv(s)= K Ky 0.5 1 1+7‘1+r=1+5`0.37+105= 徐机期望位置 0.5 10s2+10.375+0.37 (17) 根据无人机前向模型,所设计的前向距离控制 贷机 律为 1 δm=δm-Kf。-Kf。 (18) 图2水平面的几何描述 式中:δm为僚机油门输人命令;δm为长机油门输入 Fig.2 Formation geometry in level plane 命令,它由通信系统传输到僚机的控制系统中, 如图2所示,在水平面上,可以求出前向距离误 差f和侧向距离误差L,分别为1) 利用经典控制理论的根轨迹法,可以确定 式(18)中参数值为 K.=5.23,K,=0.65. 无-,m-)+-l-6, 3.2侧向距离控制律 1=,-)%-2-.(14) 侧向距离控制的目标是使侧向距离误差。最 小,侧向距离控制的逻辑关系为:副翼→滚转角速 度→滚转角→侧向速度→侧向距离。 式中:V=√+,为长机速度在水平面上的投 通过改变方向舵可以增大荷兰滚阻尼,从而增 影.因此,、。对于时间的导数∫。、l.可由式(15)求 大飞机的侧向稳定性.副翼、方向舵、升降舵等执行 得: 机构都可由一阶线性模型表示为 .von Vayn t Vovnlxu G (s)=Gan(s)=Gor(s)=1+0.05s 1 i=-y,+ 对做水平协调转弯的无人机而言,飞机水平运 (15) 动的分力来自于飞机滚转导致升力产生的水平分