正在加载图片...
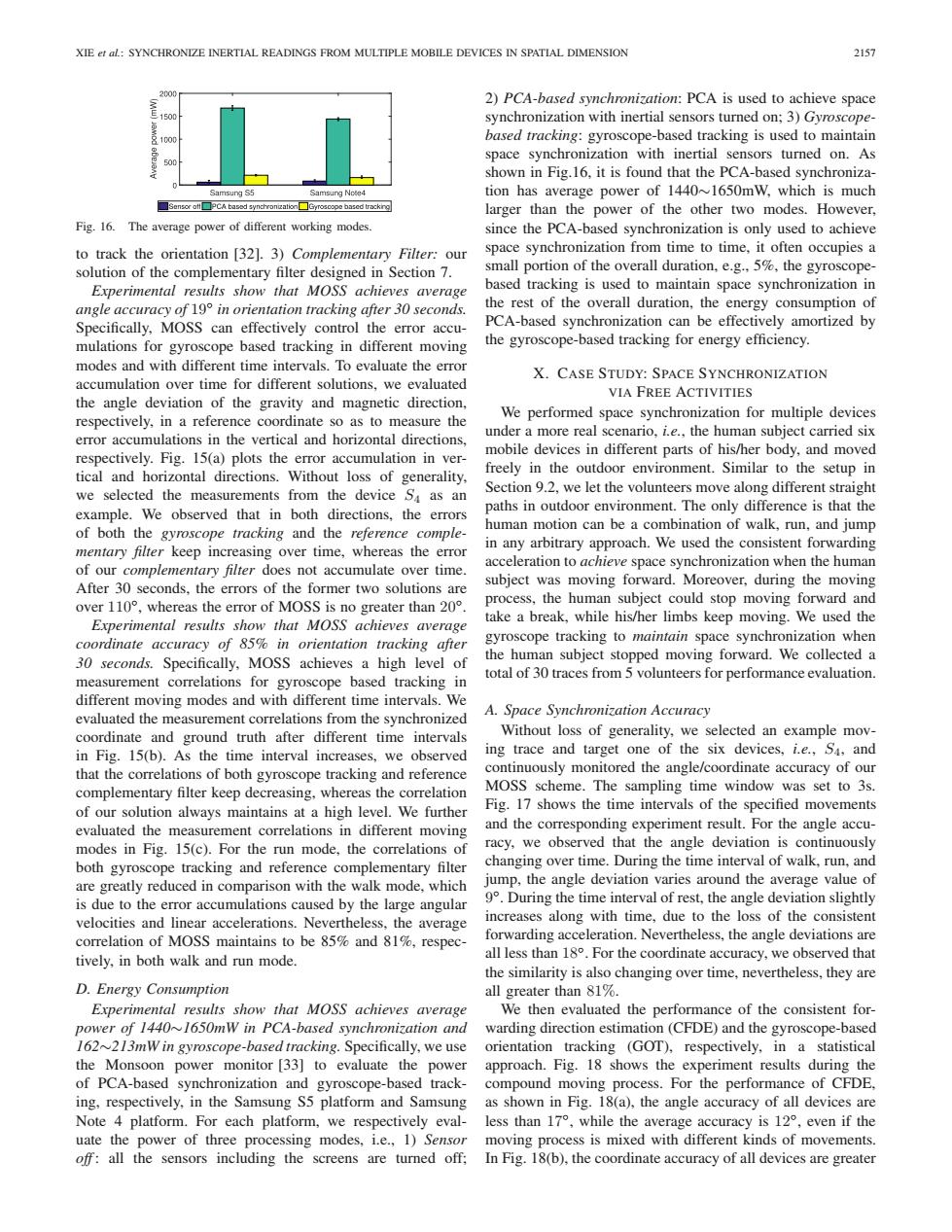
XIE et al:SYNCHRONIZE INERTIAL READINGS FROM MULTIPLE MOBILE DEVICES IN SPATIAL DIMENSION 2157 20 2)PCA-based synchronization:PCA is used to achieve space synchronization with inertial sensors turned on;3)Gyroscope- based tracking:gyroscope-based tracking is used to maintain space synchronization with inertial sensors turned on.As shown in Fig.16,it is found that the PCA-based synchroniza- Samsung S5 amsung Note4 tion has average power of 1440~1650mW,which is much ☐San5rah▣PCA ba5 ed synchronization[☐GyTosc3p8 based trackin9 larger than the power of the other two modes.However, Fig.16.The average power of different working modes. since the PCA-based synchronization is only used to achieve to track the orientation [32].3)Complementary Filter:our space synchronization from time to time,it often occupies a solution of the complementary filter designed in Section 7. small portion of the overall duration,e.g.,5%,the gyroscope- Experimental results show that MOSS achieves average based tracking is used to maintain space synchronization in angle accuracy of 199 in orientation tracking after 30 seconds. the rest of the overall duration,the energy consumption of Specifically,MOSS can effectively control the error accu- PCA-based synchronization can be effectively amortized by mulations for gyroscope based tracking in different moving the gyroscope-based tracking for energy efficiency. modes and with different time intervals.To evaluate the error X.CASE STUDY:SPACE SYNCHRONIZATION accumulation over time for different solutions,we evaluated VIA FREE ACTIVITIES the angle deviation of the gravity and magnetic direction, respectively,in a reference coordinate so as to measure the We performed space synchronization for multiple devices error accumulations in the vertical and horizontal directions, under a more real scenario,i.e.,the human subject carried six respectively.Fig.15(a)plots the error accumulation in ver- mobile devices in different parts of his/her body,and moved tical and horizontal directions.Without loss of generality, freely in the outdoor environment.Similar to the setup in we s selected the measurements from the device S4 as an Section 9.2,we let the volunteers move along different straight example.We observed that in both directions,the errors paths in outdoor environment.The only difference is that the human motion can be a combination of walk,run.and jump of both the gyroscope tracking and the reference comple- mentary filter keep increasing over time,whereas the error in any arbitrary approach.We used the consistent forwarding of our complementary filter does not accumulate over time. acceleration to achieve space synchronization when the human After 30 seconds.the errors of the former two solutions are subject was moving forward.Moreover,during the moving over 110°,whereas the error of MOSS is no greater than20° process,the human subject could stop moving forward and Experimental results show that MOSS achieves average take a break,while his/her limbs keep moving.We used the coordinate accuracy of 85%in orientation tracking after gyroscope tracking to maintain space synchronization when 30 seconds.Specifically,MOSS achieves a high level of the human subject stopped moving forward.We collected a total of 30 traces from 5 volunteers for performance evaluation. measurement correlations for gyroscope based tracking in different moving modes and with different time intervals.We A.Space Synchronization Accuracy evaluated the measurement correlations from the synchronized coordinate and ground truth after different time intervals Without loss of generality,we selected an example mov- in Fig.15(b).As the time interval increases,we observed ing trace and target one of the six devices,i.e.,S4,and that the correlations of both gyroscope tracking and reference continuously monitored the angle/coordinate accuracy of our complementary filter keep decreasing,whereas the correlation MOSS scheme.The sampling time window was set to 3s. of our solution always maintains at a high level.We further Fig.17 shows the time intervals of the specified movements evaluated the measurement correlations in different moving and the corresponding experiment result.For the angle accu- modes in Fig.15(c).For the run mode,the correlations of racy,we observed that the angle deviation is continuously both gyroscope tracking and reference complementary filter changing over time.During the time interval of walk,run,and are greatly reduced in comparison with the walk mode,which jump,the angle deviation varies around the average value of is due to the error accumulations caused by the large angular 9.During the time interval of rest,the angle deviation slightly velocities and linear accelerations.Nevertheless,the average increases along with time,due to the loss of the consistent correlation of MOSS maintains to be 85%and 81%,respec- forwarding acceleration.Nevertheless,the angle deviations are tively,in both walk and run mode. all less than 18.For the coordinate accuracy,we observed that the similarity is also changing over time,nevertheless,they are D.Energy Consumption all greater than 81%. Experimental results show that MOSS achieves average We then evaluated the performance of the consistent for- power of 1440~1650mW in PCA-based synchronization and warding direction estimation(CFDE)and the gyroscope-based 162~213mW in gyroscope-based tracking.Specifically,we use orientation tracking (GOT),respectively,in a statistical the Monsoon power monitor [33]to evaluate the power approach.Fig.18 shows the experiment results during the of PCA-based synchronization and gyroscope-based track- compound moving process.For the performance of CFDE, ing,respectively,in the Samsung S5 platform and Samsung as shown in Fig.18(a),the angle accuracy of all devices are Note 4 platform.For each platform,we respectively eval- less than 17°,while the average accuracy is 12°,even if the uate the power of three processing modes,i.e.,1)Sensor moving process is mixed with different kinds of movements. off:all the sensors including the screens are turned off: In Fig.18(b),the coordinate accuracy of all devices are greaterXIE et al.: SYNCHRONIZE INERTIAL READINGS FROM MULTIPLE MOBILE DEVICES IN SPATIAL DIMENSION 2157 Fig. 16. The average power of different working modes. to track the orientation [32]. 3) Complementary Filter: our solution of the complementary filter designed in Section 7. Experimental results show that MOSS achieves average angle accuracy of 19◦ in orientation tracking after 30 seconds. Specifically, MOSS can effectively control the error accumulations for gyroscope based tracking in different moving modes and with different time intervals. To evaluate the error accumulation over time for different solutions, we evaluated the angle deviation of the gravity and magnetic direction, respectively, in a reference coordinate so as to measure the error accumulations in the vertical and horizontal directions, respectively. Fig. 15(a) plots the error accumulation in vertical and horizontal directions. Without loss of generality, we selected the measurements from the device S4 as an example. We observed that in both directions, the errors of both the gyroscope tracking and the reference complementary filter keep increasing over time, whereas the error of our complementary filter does not accumulate over time. After 30 seconds, the errors of the former two solutions are over 110◦, whereas the error of MOSS is no greater than 20◦. Experimental results show that MOSS achieves average coordinate accuracy of 85% in orientation tracking after 30 seconds. Specifically, MOSS achieves a high level of measurement correlations for gyroscope based tracking in different moving modes and with different time intervals. We evaluated the measurement correlations from the synchronized coordinate and ground truth after different time intervals in Fig. 15(b). As the time interval increases, we observed that the correlations of both gyroscope tracking and reference complementary filter keep decreasing, whereas the correlation of our solution always maintains at a high level. We further evaluated the measurement correlations in different moving modes in Fig. 15(c). For the run mode, the correlations of both gyroscope tracking and reference complementary filter are greatly reduced in comparison with the walk mode, which is due to the error accumulations caused by the large angular velocities and linear accelerations. Nevertheless, the average correlation of MOSS maintains to be 85% and 81%, respectively, in both walk and run mode. D. Energy Consumption Experimental results show that MOSS achieves average power of 1440∼1650mW in PCA-based synchronization and 162∼213mW in gyroscope-based tracking. Specifically, we use the Monsoon power monitor [33] to evaluate the power of PCA-based synchronization and gyroscope-based tracking, respectively, in the Samsung S5 platform and Samsung Note 4 platform. For each platform, we respectively evaluate the power of three processing modes, i.e., 1) Sensor off : all the sensors including the screens are turned off; 2) PCA-based synchronization: PCA is used to achieve space synchronization with inertial sensors turned on; 3) Gyroscopebased tracking: gyroscope-based tracking is used to maintain space synchronization with inertial sensors turned on. As shown in Fig.16, it is found that the PCA-based synchronization has average power of 1440∼1650mW, which is much larger than the power of the other two modes. However, since the PCA-based synchronization is only used to achieve space synchronization from time to time, it often occupies a small portion of the overall duration, e.g., 5%, the gyroscopebased tracking is used to maintain space synchronization in the rest of the overall duration, the energy consumption of PCA-based synchronization can be effectively amortized by the gyroscope-based tracking for energy efficiency. X. CASE STUDY: SPACE SYNCHRONIZATION VIA FREE ACTIVITIES We performed space synchronization for multiple devices under a more real scenario, i.e., the human subject carried six mobile devices in different parts of his/her body, and moved freely in the outdoor environment. Similar to the setup in Section 9.2, we let the volunteers move along different straight paths in outdoor environment. The only difference is that the human motion can be a combination of walk, run, and jump in any arbitrary approach. We used the consistent forwarding acceleration to achieve space synchronization when the human subject was moving forward. Moreover, during the moving process, the human subject could stop moving forward and take a break, while his/her limbs keep moving. We used the gyroscope tracking to maintain space synchronization when the human subject stopped moving forward. We collected a total of 30 traces from 5 volunteers for performance evaluation. A. Space Synchronization Accuracy Without loss of generality, we selected an example moving trace and target one of the six devices, i.e., S4, and continuously monitored the angle/coordinate accuracy of our MOSS scheme. The sampling time window was set to 3s. Fig. 17 shows the time intervals of the specified movements and the corresponding experiment result. For the angle accuracy, we observed that the angle deviation is continuously changing over time. During the time interval of walk, run, and jump, the angle deviation varies around the average value of 9◦. During the time interval of rest, the angle deviation slightly increases along with time, due to the loss of the consistent forwarding acceleration. Nevertheless, the angle deviations are all less than 18◦. For the coordinate accuracy, we observed that the similarity is also changing over time, nevertheless, they are all greater than 81%. We then evaluated the performance of the consistent forwarding direction estimation (CFDE) and the gyroscope-based orientation tracking (GOT), respectively, in a statistical approach. Fig. 18 shows the experiment results during the compound moving process. For the performance of CFDE, as shown in Fig. 18(a), the angle accuracy of all devices are less than 17◦, while the average accuracy is 12◦, even if the moving process is mixed with different kinds of movements. In Fig. 18(b), the coordinate accuracy of all devices are greater