正在加载图片...
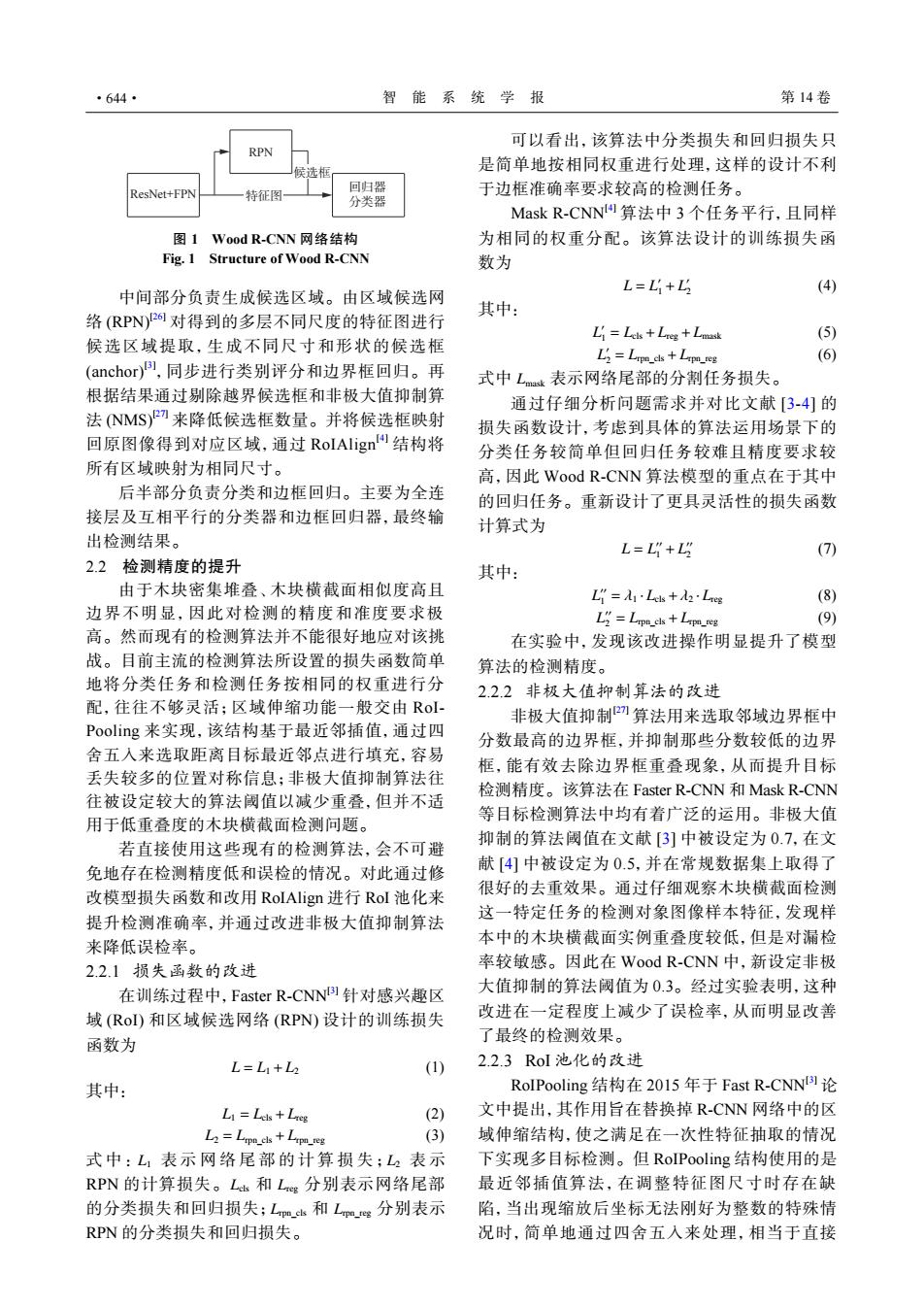
·644· 智能系统学报 第14卷 可以看出,该算法中分类损失和回归损失只 RPN 候选框 是简单地按相同权重进行处理,这样的设计不利 回归器 ResNet+FPN 特征图 于边框准确率要求较高的检测任务。 分类器 Mask R-CNN算法中3个任务平行,且同样 图1 Wood R-CNN网络结构 为相同的权重分配。该算法设计的训练损失函 Fig.1 Structure of Wood R-CNN 数为 中间部分负责生成候选区域。由区域候选网 L=L+L (4) 其中: 络(RPN)2对得到的多层不同尺度的特征图进行 候选区域提取,生成不同尺寸和形状的候选框 Li=Les+Lreg+Lmask (5) L2 Lrpn_cs +Lrp_reg (6) (anchor),同步进行类别评分和边界框回归。再 式中Lmk表示网络尾部的分割任务损失。 根据结果通过剔除越界候选框和非极大值抑制算 通过仔细分析问题需求并对比文献[3-4]的 法NMS)2啊来降低候选框数量。并将候选框映射 损失函数设计,考虑到具体的算法运用场景下的 回原图像得到对应区域,通过RolAlign结构将 分类任务较简单但回归任务较难且精度要求较 所有区域映射为相同尺寸。 高,因此Wood R-CNN算法模型的重点在于其中 后半部分负责分类和边框回归。主要为全连 的回归任务。重新设计了更具灵活性的损失函数 接层及互相平行的分类器和边框回归器,最终输 计算式为 出检测结果。 L=L"+L" (7) 2.2检测精度的提升 其中: 由于木块密集堆叠、木块横截面相似度高且 L”=Ls+2L (8) 边界不明显,因此对检测的精度和准度要求极 L2=Lrpe cls+Lam_reg (9) 高。然而现有的检测算法并不能很好地应对该挑 在实验中,发现该改进操作明显提升了模型 战。目前主流的检测算法所设置的损失函数简单 算法的检测精度。 地将分类任务和检测任务按相同的权重进行分 2.2.2非极大值抑制算法的改进 配,往往不够灵活;区域伸缩功能一般交由Ro- 非极大值抑制可算法用来选取邻域边界框中 Pooling来实现,该结构基于最近邻插值,通过四 分数最高的边界框,并抑制那些分数较低的边界 舍五入来选取距离目标最近邻点进行填充,容易 框,能有效去除边界框重叠现象,从而提升目标 丢失较多的位置对称信息;非极大值抑制算法往 检测精度。该算法在Faster R-CNN和Mask R-CNN 往被设定较大的算法阈值以减少重叠,但并不适 用于低重叠度的木块横截面检测问题。 等目标检测算法中均有着广泛的运用。非极大值 若直接使用这些现有的检测算法,会不可避 抑制的算法阈值在文献[3]中被设定为0.7,在文 免地存在检测精度低和误检的情况。对此通过修 献[4]中被设定为0.5,并在常规数据集上取得了 改模型损失函数和改用RoIAlign进行Rol池化来 很好的去重效果。通过仔细观察木块横截面检测 提升检测准确率,并通过改进非极大值抑制算法 这一特定任务的检测对象图像样本特征,发现样 来降低误检率。 本中的木块横截面实例重叠度较低,但是对漏检 2.2.1损失函数的改进 率较敏感。因此在Wood R-CNN中,新设定非极 在训练过程中,Faster R-CNN)针对感兴趣区 大值抑制的算法阈值为0.3。经过实验表明,这种 域(RoI)和区域候选网络(RPN)设计的训练损失 改进在一定程度上减少了误检率,从而明显改善 函数为 了最终的检测效果。 L=L+L (1) 2.2.3Rol池化的改进 其中: RolPooling结构在20l5年于Fast R-CNN)论 LI Lels +Lreg (2) 文中提出,其作用旨在替换掉R-CNN网络中的区 L2=Lrpncls+Lrpn n (3) 域伸缩结构,使之满足在一次性特征抽取的情况 式中:L,表示网络尾部的计算损失:L2表示 下实现多目标检测。但RolPooling结构使用的是 RPN的计算损失。Ls和L分别表示网络尾部 最近邻插值算法,在调整特征图尺寸时存在缺 的分类损失和回归损失;Lpm山和Lm分别表示 陷,当出现缩放后坐标无法刚好为整数的特殊情 RPN的分类损失和回归损失。 况时,简单地通过四舍五入来处理,相当于直接ResNet+FPN RPN 回归器 特征图 分类器 候选框 图 1 Wood R-CNN 网络结构 Fig. 1 Structure of Wood R-CNN 中间部分负责生成候选区域。由区域候选网 络 (RPN)[26] 对得到的多层不同尺度的特征图进行 候选区域提取,生成不同尺寸和形状的候选框 (anchor)[3] ,同步进行类别评分和边界框回归。再 根据结果通过剔除越界候选框和非极大值抑制算 法 (NMS)[27] 来降低候选框数量。并将候选框映射 回原图像得到对应区域,通过 RoIAlign[4] 结构将 所有区域映射为相同尺寸。 后半部分负责分类和边框回归。主要为全连 接层及互相平行的分类器和边框回归器,最终输 出检测结果。 2.2 检测精度的提升 由于木块密集堆叠、木块横截面相似度高且 边界不明显,因此对检测的精度和准度要求极 高。然而现有的检测算法并不能很好地应对该挑 战。目前主流的检测算法所设置的损失函数简单 地将分类任务和检测任务按相同的权重进行分 配,往往不够灵活;区域伸缩功能一般交由 RoIPooling 来实现,该结构基于最近邻插值,通过四 舍五入来选取距离目标最近邻点进行填充,容易 丢失较多的位置对称信息;非极大值抑制算法往 往被设定较大的算法阈值以减少重叠,但并不适 用于低重叠度的木块横截面检测问题。 若直接使用这些现有的检测算法,会不可避 免地存在检测精度低和误检的情况。对此通过修 改模型损失函数和改用 RoIAlign 进行 RoI 池化来 提升检测准确率,并通过改进非极大值抑制算法 来降低误检率。 2.2.1 损失函数的改进 在训练过程中,Faster R-CNN[3] 针对感兴趣区 域 (RoI) 和区域候选网络 (RPN) 设计的训练损失 函数为 L = L1 + L2 (1) 其中: L1 = Lcls + Lreg (2) L2 = Lrpn_cls + Lrpn_reg (3) L1 L2 Lcls Lreg Lrpn_cls Lrpn_reg 式中: 表示网络尾部的计算损失; 表 示 RPN 的计算损失。 和 分别表示网络尾部 的分类损失和回归损失; 和 分别表示 RPN 的分类损失和回归损失。 可以看出,该算法中分类损失和回归损失只 是简单地按相同权重进行处理,这样的设计不利 于边框准确率要求较高的检测任务。 Mask R-CNN[4] 算法中 3 个任务平行,且同样 为相同的权重分配。该算法设计的训练损失函 数为 L = L ′ 1 + L ′ 2 (4) 其中: L ′ 1 = Lcls + Lreg + Lmask (5) L ′ 2 = Lrpn_cls + Lrpn_reg (6) 式中 Lmask 表示网络尾部的分割任务损失。 通过仔细分析问题需求并对比文献 [3-4] 的 损失函数设计,考虑到具体的算法运用场景下的 分类任务较简单但回归任务较难且精度要求较 高,因此 Wood R-CNN 算法模型的重点在于其中 的回归任务。重新设计了更具灵活性的损失函数 计算式为 L = L ′′ 1 + L ′′ 2 (7) 其中: L ′′ 1 = λ1 · Lcls +λ2 · Lreg (8) L ′′ 2 = Lrpn_cls + Lrpn_reg (9) 在实验中,发现该改进操作明显提升了模型 算法的检测精度。 2.2.2 非极大值抑制算法的改进 非极大值抑制[27] 算法用来选取邻域边界框中 分数最高的边界框,并抑制那些分数较低的边界 框,能有效去除边界框重叠现象,从而提升目标 检测精度。该算法在 Faster R-CNN 和 Mask R-CNN 等目标检测算法中均有着广泛的运用。非极大值 抑制的算法阈值在文献 [3] 中被设定为 0.7,在文 献 [4] 中被设定为 0.5,并在常规数据集上取得了 很好的去重效果。通过仔细观察木块横截面检测 这一特定任务的检测对象图像样本特征,发现样 本中的木块横截面实例重叠度较低,但是对漏检 率较敏感。因此在 Wood R-CNN 中,新设定非极 大值抑制的算法阈值为 0.3。经过实验表明,这种 改进在一定程度上减少了误检率,从而明显改善 了最终的检测效果。 2.2.3 RoI 池化的改进 RoIPooling 结构在 2015 年于 Fast R-CNN[3] 论 文中提出,其作用旨在替换掉 R-CNN 网络中的区 域伸缩结构,使之满足在一次性特征抽取的情况 下实现多目标检测。但 RoIPooling 结构使用的是 最近邻插值算法,在调整特征图尺寸时存在缺 陷,当出现缩放后坐标无法刚好为整数的特殊情 况时,简单地通过四舍五入来处理,相当于直接 ·644· 智 能 系 统 学 报 第 14 卷