正在加载图片...
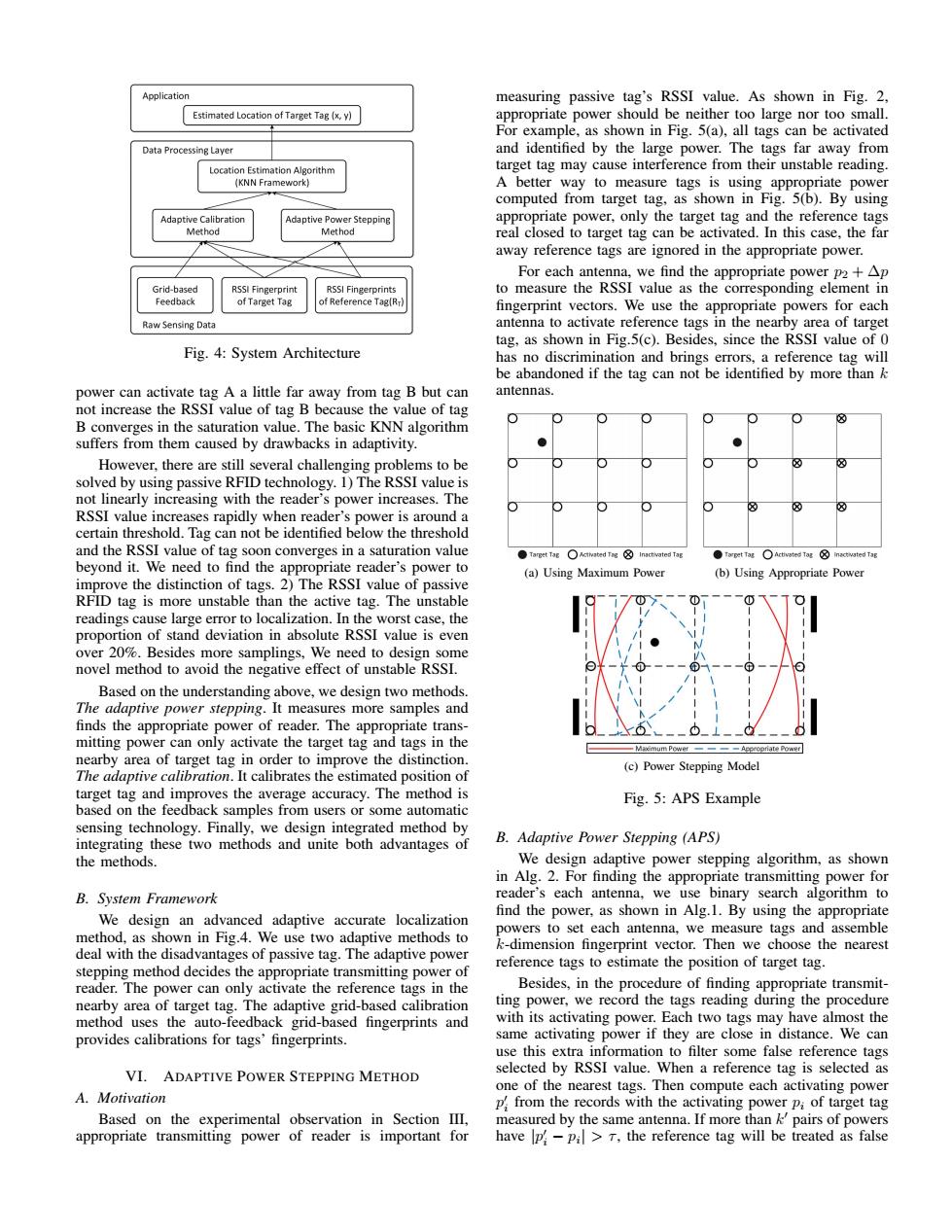
Application measuring passive tag's RSSI value.As shown in Fig.2, Estimated Location of Target Tag (x,y) appropriate power should be neither too large nor too small. For example,as shown in Fig.5(a),all tags can be activated Data Processing Layer and identified by the large power.The tags far away from Location Estimation Algorithm target tag may cause interference from their unstable reading. (KNN Framework) A better way to measure tags is using appropriate power computed from target tag,as shown in Fig.5(b).By using Adaptive Calibration Adaptive Power Stepping appropriate power,only the target tag and the reference tags Method Method real closed to target tag can be activated.In this case,the far away reference tags are ignored in the appropriate power. For each antenna,we find the appropriate power p2+Ap Grid-based RSSI Fingerprint RSSI Fingerprints to measure the RSSI value as the corresponding element in Feedback of Target Tag of Reference Tag(Rr) fingerprint vectors.We use the appropriate powers for each Raw Sensing Data antenna to activate reference tags in the nearby area of target tag,as shown in Fig.5(c).Besides,since the RSSI value of 0 Fig.4:System Architecture has no discrimination and brings errors,a reference tag will be abandoned if the tag can not be identified by more than k power can activate tag A a little far away from tag B but can antennas. not increase the RSSI value of tag B because the value of tag B converges in the saturation value.The basic KNN algorithm suffers from them caused by drawbacks in adaptivity. However,there are still several challenging problems to be solved by using passive RFID technology.1)The RSSI value is not linearly increasing with the reader's power increases.The RSSI value increases rapidly when reader's power is around a certain threshold.Tag can not be identified below the threshold and the RSSI value of tag soon converges in a saturation value ●Target Tag○Acthabed Tag☒Inactivated Tag ●Tarpet Tag○Activated Tag&inactated Tag beyond it.We need to find the appropriate reader's power to (a)Using Maximum Power (b)Using Appropriate Power improve the distinction of tags.2)The RSSI value of passive RFID tag is more unstable than the active tag.The unstable readings cause large error to localization.In the worst case,the proportion of stand deviation in absolute RSSI value is even over 20%.Besides more samplings,We need to design some novel method to avoid the negative effect of unstable RSSI. Based on the understanding above,we design two methods. The adaptive power stepping.It measures more samples and finds the appropriate power of reader.The appropriate trans- mitting power can only activate the target tag and tags in the -Macimum Power- nearby area of target tag in order to improve the distinction. (c)Power Stepping Model The adaptive calibration.It calibrates the estimated position of target tag and improves the average accuracy.The method is Fig.5:APS Example based on the feedback samples from users or some automatic sensing technology.Finally,we design integrated method by integrating these two methods and unite both advantages of B.Adaptive Power Stepping(APS) the methods. We design adaptive power stepping algorithm,as shown in Alg.2.For finding the appropriate transmitting power for B.System Framework reader's each antenna,we use binary search algorithm to We design an advanced adaptive accurate localization find the power,as shown in Alg.1.By using the appropriate powers to set each antenna,we measure tags and assemble method.as shown in Fig.4.We use two adaptive methods to deal with the disadvantages of passive tag.The adaptive power k-dimension fingerprint vector.Then we choose the nearest stepping method decides the appropriate transmitting power of reference tags to estimate the position of target tag. reader.The power can only activate the reference tags in the Besides,in the procedure of finding appropriate transmit- nearby area of target tag.The adaptive grid-based calibration ting power,we record the tags reading during the procedure method uses the auto-feedback grid-based fingerprints and with its activating power.Each two tags may have almost the provides calibrations for tags'fingerprints. same activating power if they are close in distance.We can use this extra information to filter some false reference tags VI.ADAPTIVE POWER STEPPING METHOD selected by RSSI value.When a reference tag is selected as one of the nearest tags.Then compute each activating power A.Motivation p from the records with the activating power p;of target tag Based on the experimental observation in Section II, measured by the same antenna.If more than k'pairs of powers appropriate transmitting power of reader is important for have lp-pil >T,the reference tag will be treated as falseFig. 4: System Architecture power can activate tag A a little far away from tag B but can not increase the RSSI value of tag B because the value of tag B converges in the saturation value. The basic KNN algorithm suffers from them caused by drawbacks in adaptivity. However, there are still several challenging problems to be solved by using passive RFID technology. 1) The RSSI value is not linearly increasing with the reader’s power increases. The RSSI value increases rapidly when reader’s power is around a certain threshold. Tag can not be identified below the threshold and the RSSI value of tag soon converges in a saturation value beyond it. We need to find the appropriate reader’s power to improve the distinction of tags. 2) The RSSI value of passive RFID tag is more unstable than the active tag. The unstable readings cause large error to localization. In the worst case, the proportion of stand deviation in absolute RSSI value is even over 20%. Besides more samplings, We need to design some novel method to avoid the negative effect of unstable RSSI. Based on the understanding above, we design two methods. The adaptive power stepping. It measures more samples and finds the appropriate power of reader. The appropriate transmitting power can only activate the target tag and tags in the nearby area of target tag in order to improve the distinction. The adaptive calibration. It calibrates the estimated position of target tag and improves the average accuracy. The method is based on the feedback samples from users or some automatic sensing technology. Finally, we design integrated method by integrating these two methods and unite both advantages of the methods. B. System Framework We design an advanced adaptive accurate localization method, as shown in Fig.4. We use two adaptive methods to deal with the disadvantages of passive tag. The adaptive power stepping method decides the appropriate transmitting power of reader. The power can only activate the reference tags in the nearby area of target tag. The adaptive grid-based calibration method uses the auto-feedback grid-based fingerprints and provides calibrations for tags’ fingerprints. VI. ADAPTIVE POWER STEPPING METHOD A. Motivation Based on the experimental observation in Section III, appropriate transmitting power of reader is important for measuring passive tag’s RSSI value. As shown in Fig. 2, appropriate power should be neither too large nor too small. For example, as shown in Fig. 5(a), all tags can be activated and identified by the large power. The tags far away from target tag may cause interference from their unstable reading. A better way to measure tags is using appropriate power computed from target tag, as shown in Fig. 5(b). By using appropriate power, only the target tag and the reference tags real closed to target tag can be activated. In this case, the far away reference tags are ignored in the appropriate power. For each antenna, we find the appropriate power p2 + Δp to measure the RSSI value as the corresponding element in fingerprint vectors. We use the appropriate powers for each antenna to activate reference tags in the nearby area of target tag, as shown in Fig.5(c). Besides, since the RSSI value of 0 has no discrimination and brings errors, a reference tag will be abandoned if the tag can not be identified by more than k antennas. (a) Using Maximum Power (b) Using Appropriate Power (c) Power Stepping Model Fig. 5: APS Example B. Adaptive Power Stepping (APS) We design adaptive power stepping algorithm, as shown in Alg. 2. For finding the appropriate transmitting power for reader’s each antenna, we use binary search algorithm to find the power, as shown in Alg.1. By using the appropriate powers to set each antenna, we measure tags and assemble k-dimension fingerprint vector. Then we choose the nearest reference tags to estimate the position of target tag. Besides, in the procedure of finding appropriate transmitting power, we record the tags reading during the procedure with its activating power. Each two tags may have almost the same activating power if they are close in distance. We can use this extra information to filter some false reference tags selected by RSSI value. When a reference tag is selected as one of the nearest tags. Then compute each activating power p i from the records with the activating power pi of target tag measured by the same antenna. If more than k pairs of powers have |p i − pi| > τ, the reference tag will be treated as false���