正在加载图片...
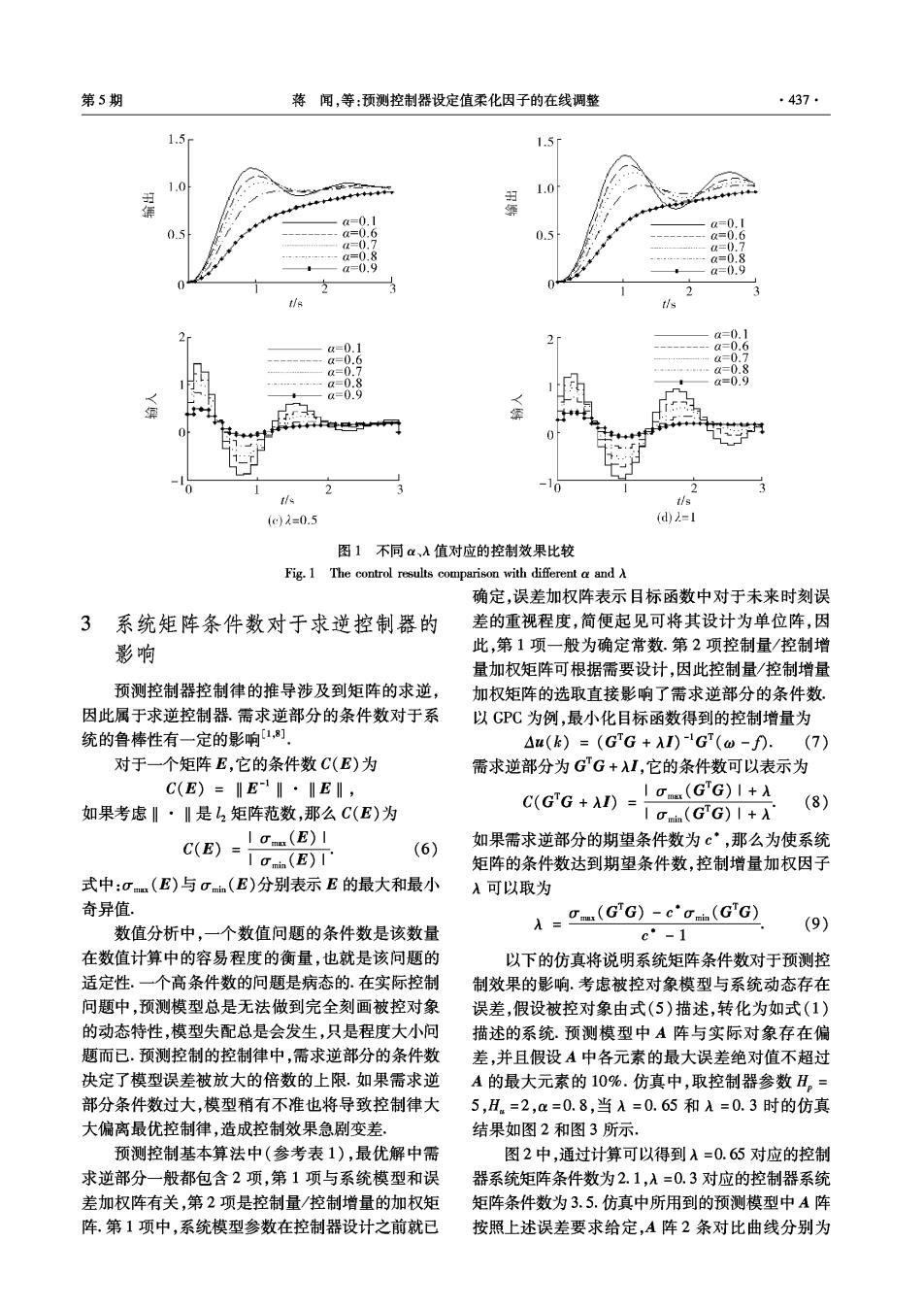
第5期 蒋闻,等:预测控制器设定值柔化因子的在线调整 ·437· 1.5 1.5 1.0 1.0 a=0.1 a=0.6 正=月. a=0.7 =08 a=0.8 =0.9 a=0.9 t/s t/s =0.1 a=0.6 a=0.7 a=0.8 a=0.9 ◆+ 2 2 t/s (c)=0.5 (d2=1 图1不同、入值对应的控制效果比较 Fig.1 The control results comparison with different a and A 确定,误差加权阵表示目标函数中对于未来时刻误 3系统矩阵条件数对于求逆控制器的 差的重视程度,简便起见可将其设计为单位阵,因 影响 此,第1项一般为确定常数.第2项控制量/控制增 量加权矩阵可根据需要设计,因此控制量/控制增量 预测控制器控制律的推导涉及到矩阵的求逆, 加权矩阵的选取直接影响了需求逆部分的条件数. 因此属于求逆控制器.需求逆部分的条件数对于系 以GP℃为例,最小化目标函数得到的控制增量为 统的鲁棒性有一定的影响1,] Au(k)=(GG+A-GT(a-f).(7) 对于一个矩阵E,它的条件数C(E)为 需求逆部分为GG+入1,它的条件数可以表示为 C(E)=IE-I·IEI, (8) 如果考虑‖·‖是2矩阵范数,那么C(E)为 C(G'G+AI)=Iom(G'G)I+ I omin (GG)+ c四8 (6) 如果需求逆部分的期望条件数为c·,那么为使系统 矩阵的条件数达到期望条件数,控制增量加权因子 式中:omm(E)与on(E)分别表示E的最大和最小 入可以取为 奇异值. =(G'G)-c'ain(GG) 数值分析中,一个数值问题的条件数是该数量 (9) c-1 在数值计算中的容易程度的衡量,也就是该问题的 以下的仿真将说明系统矩阵条件数对于预测控 适定性。一个高条件数的问题是病态的.在实际控制 制效果的影响.考虑被控对象模型与系统动态存在 问题中,预测模型总是无法做到完全刻画被控对象 误差,假设被控对象由式(5)描述,转化为如式(1) 的动态特性,模型失配总是会发生,只是程度大小问 描述的系统.预测模型中A阵与实际对象存在偏 题而已.预测控制的控制律中,需求逆部分的条件数 差,并且假设A中各元素的最大误差绝对值不超过 决定了模型误差被放大的倍数的上限.如果需求逆 A的最大元素的10%.仿真中,取控制器参数H。= 部分条件数过大,模型稍有不准也将导致控制律大 5,H=2,a=0.8,当入=0.65和A=0.3时的仿真 大偏离最优控制律,造成控制效果急剧变差。 结果如图2和图3所示. 预测控制基本算法中(参考表1),最优解中需 图2中,通过计算可以得到入=0.65对应的控制 求逆部分一般都包含2项,第1项与系统模型和误 器系统矩阵条件数为2.1,入=0.3对应的控制器系统 差加权阵有关,第2项是控制量/控制增量的加权矩 矩阵条件数为3.5.仿真中所用到的预测模型中A阵 阵.第1项中,系统模型参数在控制器设计之前就已 按照上述误差要求给定,A阵2条对比曲线分别为