正在加载图片...
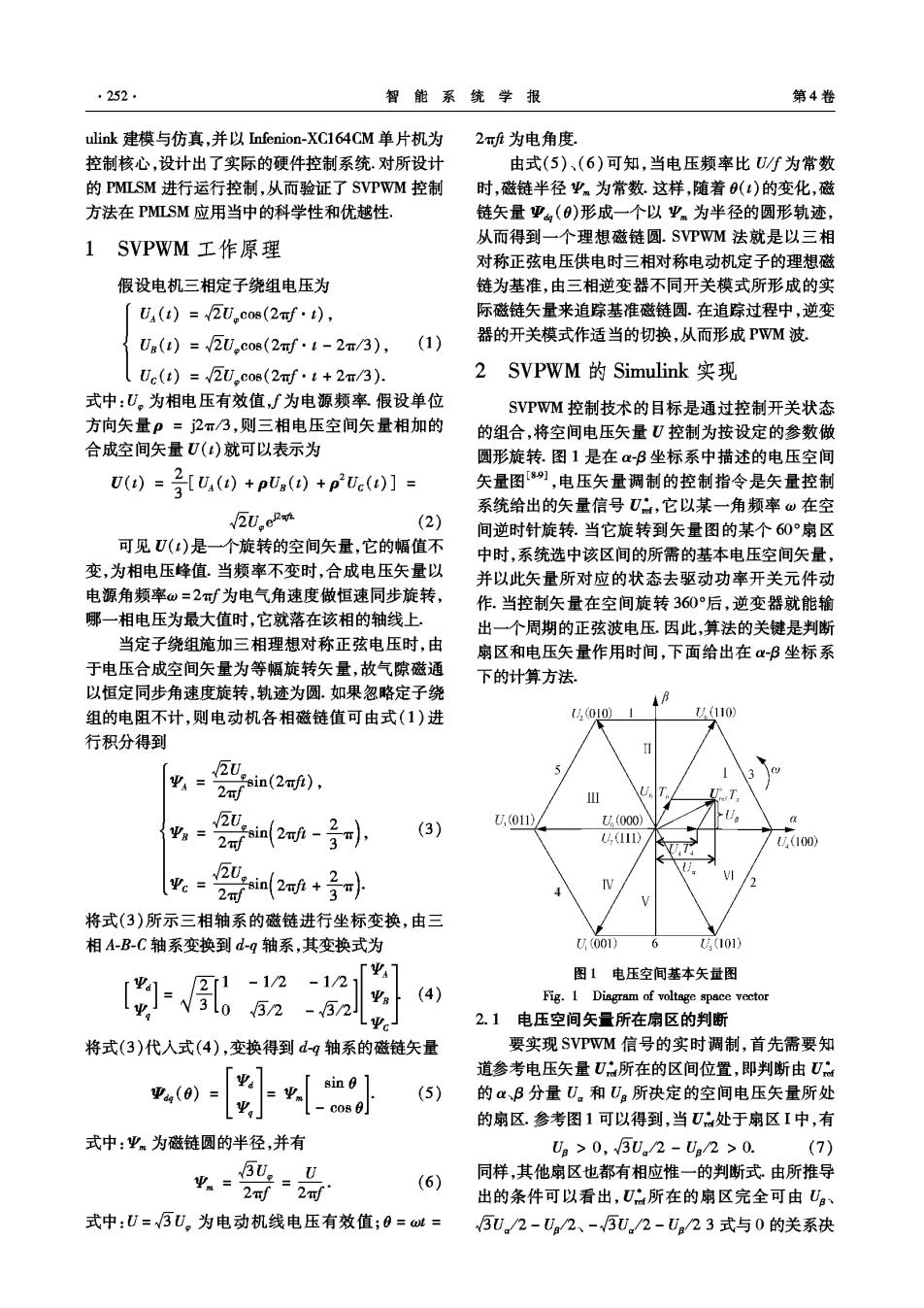
,252. 智能系统学报 第4卷 ulink建模与仿真,并以Infenion-XC164CM单片机为 2i为电角度. 控制核心,设计出了实际的硬件控制系统.对所设计 由式(5)、(6)可知,当电压频率比U/f为常数 的PMLSM进行运行控制,从而验证了SVPWM控制 时,磁链半径里为常数这样,随着()的变化,磁 方法在PMLSM应用当中的科学性和优越性. 链矢量里()形成一个以里m为半径的圆形轨迹, 从而得到一个理想磁链圆.SVPWM法就是以三相 1 SVPWM工作原理 对称正弦电压供电时三相对称电动机定子的理想磁 假设电机三相定子绕组电压为 链为基准,由三相逆变器不同开关模式所形成的实 Ua(t)=2U.cos(2f·t), 际磁链矢量来追踪基准磁链圆.在追踪过程中,逆变 Ua()=2U,c08(2f·t-2π/3), (1) 器的开关模式作适当的切换,从而形成PM波. Uc(t)=√2U.co8(2mf·t+2m/3). 2 SVPWM的Simulink实现 式中:U。为相电压有效值,∫为电源频率假设单位 SVPWM控制技术的目标是通过控制开关状态 方向矢量p=2π/3,则三相电压空间矢量相加的 的组合,将空间电压矢量U控制为按设定的参数做 合成空间矢量(:)就可以表示为 圆形旋转.图1是在B坐标系中描述的电压空间 U0=3U,))+pU,(d+p2U.(e]= 矢量图[),电压矢量调制的控制指令是矢量控制 系统给出的矢量信号U,它以某一角频率w在空 2Ue (2) 间逆时针旋转.当它旋转到矢量图的某个60°扇区 可见U()是一个旋转的空间矢量,它的幅值不 中时,系统选中该区间的所需的基本电压空间矢量, 变,为相电压峰值。当频率不变时,合成电压矢量以 并以此矢量所对应的状态去驱动功率开关元件动 电源角频率w=2∫为电气角速度做恒速同步旋转, 作.当控制矢量在空间旋转360°后,逆变器就能输 哪一相电压为最大值时,它就落在该相的轴线上. 出一个周期的正弦波电压.因此,算法的关键是判断 当定子绕组施加三相理想对称正弦电压时,由 扇区和电压矢量作用时间,下面给出在-B坐标系 于电压合成空间矢量为等幅旋转矢量,故气隙磁通 下的计算方法, 以恒定同步角速度旋转,轨迹为圆。如果忽略定子绕 组的电阻不计,则电动机各相磁链值可由式(1)进 (号(010) (110 行积分得到 20 Ψ= 2u sin(2mft), 2u 乙,(011) U(000 里8= i2i-子, (3) ,(111) (100) -号+子 将式(3)所示三相轴系的磁链进行坐标变换,由三 相A-B-C轴系变换到d-q轴系,其变换式为 U1(001) (101) 1 2-1/21 图1电压空间基本矢量图 )52-52 4 Fig.1 Diagram of voltage space vector 2.1电压空间矢量所在扇区的判断 将式(3)代入式(4),变换得到d-g轴系的磁链矢量 要实现SVPWM信号的实时调制,首先需要知 道参考电压矢量所在的区间位置,即判断由U sin 6 Ψa(0) (5) 的αB分量U.和Ua所决定的空间电压矢量所处 的扇区.参考图1可以得到,当U处于扇区I中,有 式中:业m为磁链圆的半径,并有 Ua>0,3U.2-U/2>0.(7) 3U。 U (6) 同样,其他扇区也都有相应惟一的判断式由所推导 业.=2m=2可 = 出的条件可以看出,U所在的扇区完全可由Ua、 式中:U=√3U。为电动机线电压有效值;0=at= 3U./2-Ug/2、-√3U./2-U。/23式与0的关系决