正在加载图片...
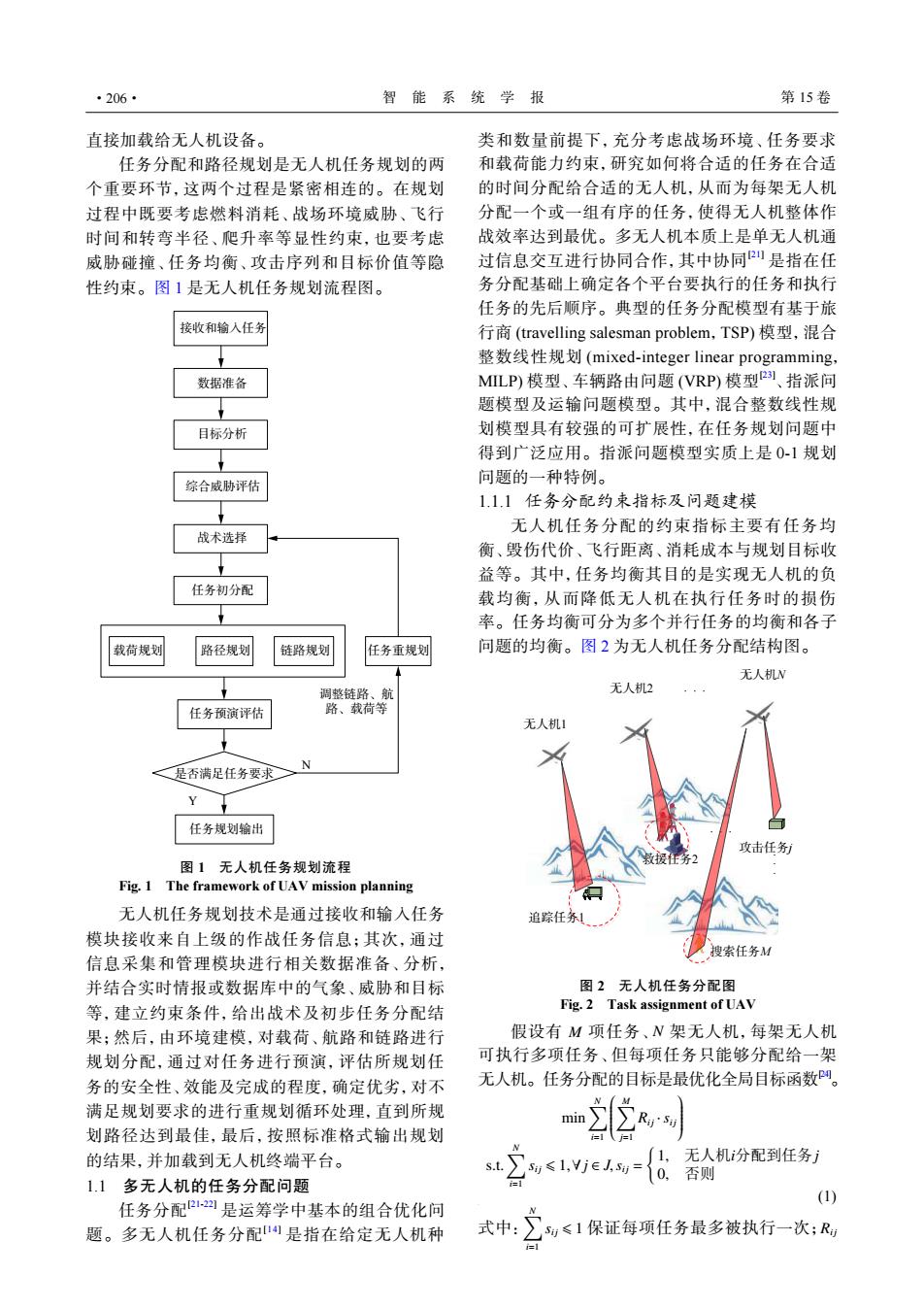
·206· 智能系统学报 第15卷 直接加载给无人机设备。 类和数量前提下,充分考虑战场环境、任务要求 任务分配和路径规划是无人机任务规划的两 和载荷能力约束,研究如何将合适的任务在合适 个重要环节,这两个过程是紧密相连的。在规划 的时间分配给合适的无人机,从而为每架无人机 过程中既要考虑燃料消耗、战场环境威胁、飞行 分配一个或一组有序的任务,使得无人机整体作 时间和转弯半径、爬升率等显性约束,也要考虑 战效率达到最优。多无人机本质上是单无人机通 威胁碰撞、任务均衡、攻击序列和目标价值等隐 过信息交互进行协同合作,其中协同川是指在任 性约束。图1是无人机任务规划流程图。 务分配基础上确定各个平台要执行的任务和执行 任务的先后顺序。典型的任务分配模型有基于旅 接收和输入任务 行商(travelling salesman problem,TSP)模型,混合 整数线性规划(mixed-integer linear programming, 数据准备 MLP)模型、车辆路由问题(VRP)模型P)、指派问 题模型及运输问题模型。其中,混合整数线性规 目标分析 划模型具有较强的可扩展性,在任务规划问题中 得到广泛应用。指派问题模型实质上是0-1规划 综合威胁评估 问题的一种特例。 1.1.1任务分配约束指标及问题建模 无人机任务分配的约束指标主要有任务均 战术选择 衡、毁伤代价、飞行距离、消耗成本与规划目标收 益等。其中,任务均衡其目的是实现无人机的负 任务初分配 载均衡,从而降低无人机在执行任务时的损伤 率。任务均衡可分为多个并行任务的均衡和各子 载荷规划 路径规划 链路规划 任务重规划 问题的均衡。图2为无人机任务分配结构图。 无人机N 调整链路、航 无人机2 任务预演评估 路、载荷等 无人机1 N 是否满足任务要求 任务规划输出 攻击任务制 图1无人机任务规划流程 Fig.1 The framework of UAV mission planning 无人机任务规划技术是通过接收和输入任务 追踪任务】 模块接收来自上级的作战任务信息;其次,通过 搜索任务M 信息采集和管理模块进行相关数据准备、分析, 并结合实时情报或数据库中的气象、威胁和目标 图2无人机任务分配图 等,建立约束条件,给出战术及初步任务分配结 Fig.2 Task assignment of UAV 果;然后,由环境建模,对载荷、航路和链路进行 假设有M项任务、N架无人机,每架无人机 规划分配,通过对任务进行预演,评估所规划任 可执行多项任务、但每项任务只能够分配给一架 务的安全性、效能及完成的程度,确定优劣,对不 无人机。任务分配的目标是最优化全局目标函数四。 满足规划要求的进行重规划循环处理,直到所规 划路径达到最佳,最后,按照标准格式输出规划 的结果,并加载到无人机终端平台。 1 无人机分配到任务j 否则 1.1多无人机的任务分配问题 任务分配2-2是运筹学中基本的组合优化问 (1) 题。多无人机任务分配)是指在给定无人机种 式中:∑列≤1保证每项任务最多被执行一次;R直接加载给无人机设备。 任务分配和路径规划是无人机任务规划的两 个重要环节,这两个过程是紧密相连的。在规划 过程中既要考虑燃料消耗、战场环境威胁、飞行 时间和转弯半径、爬升率等显性约束,也要考虑 威胁碰撞、任务均衡、攻击序列和目标价值等隐 性约束。图 1 是无人机任务规划流程图。 接收和输入任务 数据准备 目标分析 综合威胁评估 战术选择 任务初分配 任务预演评估 是否满足任务要求 任务规划输出 载荷规划 路径规划 链路规划 调整链路、航 路、载荷等 Y 任务重规划 N 图 1 无人机任务规划流程 Fig. 1 The framework of UAV mission planning 无人机任务规划技术是通过接收和输入任务 模块接收来自上级的作战任务信息;其次,通过 信息采集和管理模块进行相关数据准备、分析, 并结合实时情报或数据库中的气象、威胁和目标 等,建立约束条件,给出战术及初步任务分配结 果;然后,由环境建模,对载荷、航路和链路进行 规划分配,通过对任务进行预演,评估所规划任 务的安全性、效能及完成的程度,确定优劣,对不 满足规划要求的进行重规划循环处理,直到所规 划路径达到最佳,最后,按照标准格式输出规划 的结果,并加载到无人机终端平台。 1.1 多无人机的任务分配问题 任务分配[21-22] 是运筹学中基本的组合优化问 题。多无人机任务分配[14] 是指在给定无人机种 类和数量前提下,充分考虑战场环境、任务要求 和载荷能力约束,研究如何将合适的任务在合适 的时间分配给合适的无人机,从而为每架无人机 分配一个或一组有序的任务,使得无人机整体作 战效率达到最优。多无人机本质上是单无人机通 过信息交互进行协同合作,其中协同[21] 是指在任 务分配基础上确定各个平台要执行的任务和执行 任务的先后顺序。典型的任务分配模型有基于旅 行商 (travelling salesman problem,TSP) 模型,混合 整数线性规划 (mixed-integer linear programming, MILP) 模型、车辆路由问题 (VRP) 模型[23] 、指派问 题模型及运输问题模型。其中,混合整数线性规 划模型具有较强的可扩展性,在任务规划问题中 得到广泛应用。指派问题模型实质上是 0-1 规划 问题的一种特例。 1.1.1 任务分配约束指标及问题建模 无人机任务分配的约束指标主要有任务均 衡、毁伤代价、飞行距离、消耗成本与规划目标收 益等。其中,任务均衡其目的是实现无人机的负 载均衡,从而降低无人机在执行任务时的损伤 率。任务均衡可分为多个并行任务的均衡和各子 问题的均衡。图 2 为无人机任务分配结构图。 攻击任务j 无人机N 无人机1 无人机2 . . . . . . . . . 追踪任务1 救援任务2 搜索任务M 图 2 无人机任务分配图 Fig. 2 Task assignment of UAV 假设有 M 项任务、 N 架无人机,每架无人机 可执行多项任务、但每项任务只能够分配给一架 无人机。任务分配的目标是最优化全局目标函数[24]。 min∑N i=1 ∑M j=1 Ri j ·si j s.t. ∑N i=1 si j ⩽ 1,∀ j ∈ J,si j = { 1, 无人机i分配到任务j 0, 否则 (1) ∑N i=1 式中: si j ⩽ 1 保证每项任务最多被执行一次; Ri j ·206· 智 能 系 统 学 报 第 15 卷