正在加载图片...
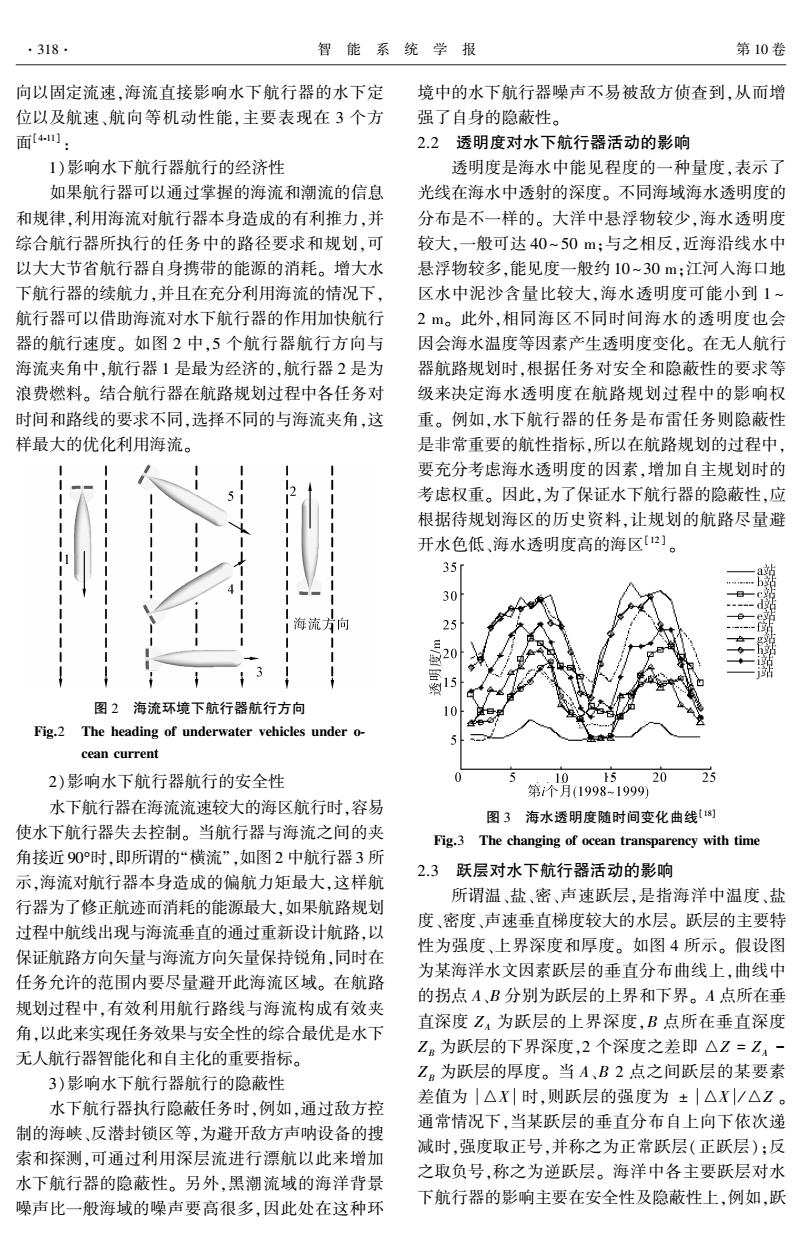
·318· 智能系统学报 第10卷 向以固定流速,海流直接影响水下航行器的水下定 境中的水下航行器噪声不易被敌方侦查到,从而增 位以及航速、航向等机动性能,主要表现在3个方 强了自身的隐蔽性。 面[4 2.2透明度对水下航行器活动的影响 1)影响水下航行器航行的经济性 透明度是海水中能见程度的一种量度,表示了 如果航行器可以通过掌握的海流和潮流的信息 光线在海水中透射的深度。不同海域海水透明度的 和规律,利用海流对航行器本身造成的有利推力,并 分布是不一样的。大洋中悬浮物较少,海水透明度 综合航行器所执行的任务中的路径要求和规划,可 较大,一般可达40~50m:与之相反,近海沿线水中 以大大节省航行器自身携带的能源的消耗。增大水 悬浮物较多,能见度一般约10~30m:江河入海口地 下航行器的续航力,并且在充分利用海流的情况下, 区水中泥沙含量比较大,海水透明度可能小到1~ 航行器可以借助海流对水下航行器的作用加快航行 2m。此外,相同海区不同时间海水的透明度也会 器的航行速度。如图2中,5个航行器航行方向与 因会海水温度等因素产生透明度变化。在无人航行 海流夹角中,航行器1是最为经济的,航行器2是为 器航路规划时,根据任务对安全和隐蔽性的要求等 浪费燃料。结合航行器在航路规划过程中各任务对 级来决定海水透明度在航路规划过程中的影响权 时间和路线的要求不同,选择不同的与海流夹角,这 重。例如,水下航行器的任务是布雷任务则隐蔽性 样最大的优化利用海流。 是非常重要的航性指标,所以在航路规划的过程中, 要充分考虑海水透明度的因素,增加自主规划时的 考虑权重。因此,为了保证水下航行器的隐蔽性,应 根据待规划海区的历史资料,让规划的航路尽量避 开水色低、海水透明度高的海区[2]。 11 35i 1 30 1海流方向 25 站 3 屬 图2海流环境下航行器航行方向 Fig.2 The heading of underwater vehicles under o- cean current 2)影响水下航行器航行的安全性 101520 25 第个月(1998-1999) 水下航行器在海流流速较大的海区航行时,容易 图3海水透明度随时间变化曲线剧 使水下航行器失去控制。当航行器与海流之间的夹 Fig.3 The changing of ocean transparency with time 角接近90时,即所谓的“横流”,如图2中航行器3所 2.3跃层对水下航行器活动的影响 示,海流对航行器本身造成的偏航力矩最大,这样航 所谓温、盐、密、声速跃层,是指海洋中温度、盐 行器为了修正航迹而消耗的能源最大,如果航路规划 度、密度、声速垂直梯度较大的水层。跃层的主要特 过程中航线出现与海流垂直的通过重新设计航路,以 性为强度、上界深度和厚度。如图4所示。假设图 保证航路方向矢量与海流方向矢量保持锐角,同时在 为某海洋水文因素跃层的垂直分布曲线上,曲线中 任务允许的范围内要尽量避开此海流区域。在航路 的拐点A、B分别为跃层的上界和下界。A点所在垂 规划过程中,有效利用航行路线与海流构成有效夹 直深度Z,为跃层的上界深度,B点所在垂直深度 角,以此来实现任务效果与安全性的综合最优是水下 无人航行器智能化和自主化的重要指标。 Z。为跃层的下界深度,2个深度之差即△Z=Z:- 3)影响水下航行器航行的隐蔽性 Zg为跃层的厚度。当A、B2点之间跃层的某要素 水下航行器执行隐蔽任务时,例如,通过敌方控 差值为|△X|时,则跃层的强度为±|△X/△Z。 通常情况下,当某跃层的垂直分布自上向下依次递 制的海峡、反潜封锁区等,为避开敌方声呐设备的搜 减时,强度取正号,并称之为正常跃层(正跃层):反 索和探测,可通过利用深层流进行漂航以此来增加 之取负号,称之为逆跃层。海洋中各主要跃层对水 水下航行器的隐蔽性。另外,黑潮流域的海洋背景 下航行器的影响主要在安全性及隐蔽性上,例如,跃 噪声比一般海域的噪声要高很多,因此处在这种环向以固定流速,海流直接影响水下航行器的水下定 位以及航速、航向等机动性能,主要表现在 3 个方 面[4⁃11] : 1)影响水下航行器航行的经济性 如果航行器可以通过掌握的海流和潮流的信息 和规律,利用海流对航行器本身造成的有利推力,并 综合航行器所执行的任务中的路径要求和规划,可 以大大节省航行器自身携带的能源的消耗。 增大水 下航行器的续航力,并且在充分利用海流的情况下, 航行器可以借助海流对水下航行器的作用加快航行 器的航行速度。 如图 2 中,5 个航行器航行方向与 海流夹角中,航行器 1 是最为经济的,航行器 2 是为 浪费燃料。 结合航行器在航路规划过程中各任务对 时间和路线的要求不同,选择不同的与海流夹角,这 样最大的优化利用海流。 图 2 海流环境下航行器航行方向 Fig.2 The heading of underwater vehicles under o⁃ cean current 2)影响水下航行器航行的安全性 水下航行器在海流流速较大的海区航行时,容易 使水下航行器失去控制。 当航行器与海流之间的夹 角接近 90°时,即所谓的“横流”,如图 2 中航行器 3 所 示,海流对航行器本身造成的偏航力矩最大,这样航 行器为了修正航迹而消耗的能源最大,如果航路规划 过程中航线出现与海流垂直的通过重新设计航路,以 保证航路方向矢量与海流方向矢量保持锐角,同时在 任务允许的范围内要尽量避开此海流区域。 在航路 规划过程中,有效利用航行路线与海流构成有效夹 角,以此来实现任务效果与安全性的综合最优是水下 无人航行器智能化和自主化的重要指标。 3)影响水下航行器航行的隐蔽性 水下航行器执行隐蔽任务时,例如,通过敌方控 制的海峡、反潜封锁区等,为避开敌方声呐设备的搜 索和探测,可通过利用深层流进行漂航以此来增加 水下航行器的隐蔽性。 另外,黑潮流域的海洋背景 噪声比一般海域的噪声要高很多,因此处在这种环 境中的水下航行器噪声不易被敌方侦查到,从而增 强了自身的隐蔽性。 2.2 透明度对水下航行器活动的影响 透明度是海水中能见程度的一种量度,表示了 光线在海水中透射的深度。 不同海域海水透明度的 分布是不一样的。 大洋中悬浮物较少,海水透明度 较大,一般可达 40 ~ 50 m;与之相反,近海沿线水中 悬浮物较多,能见度一般约 10~30 m;江河入海口地 区水中泥沙含量比较大,海水透明度可能小到 1 ~ 2 m。 此外,相同海区不同时间海水的透明度也会 因会海水温度等因素产生透明度变化。 在无人航行 器航路规划时,根据任务对安全和隐蔽性的要求等 级来决定海水透明度在航路规划过程中的影响权 重。 例如,水下航行器的任务是布雷任务则隐蔽性 是非常重要的航性指标,所以在航路规划的过程中, 要充分考虑海水透明度的因素,增加自主规划时的 考虑权重。 因此,为了保证水下航行器的隐蔽性,应 根据待规划海区的历史资料,让规划的航路尽量避 开水色低、海水透明度高的海区[12 ] 。 图 3 海水透明度随时间变化曲线[18] Fig.3 The changing of ocean transparency with time 2.3 跃层对水下航行器活动的影响 所谓温、盐、密、声速跃层,是指海洋中温度、盐 度、密度、声速垂直梯度较大的水层。 跃层的主要特 性为强度、上界深度和厚度。 如图 4 所示。 假设图 为某海洋水文因素跃层的垂直分布曲线上,曲线中 的拐点 A、B 分别为跃层的上界和下界。 A 点所在垂 直深度 ZA 为跃层的上界深度,B 点所在垂直深度 ZB 为跃层的下界深度,2 个深度之差即 △Z = ZA - ZB 为跃层的厚度。 当 A、B 2 点之间跃层的某要素 差值为 △X 时,则跃层的强度为 ± △X / △Z 。 通常情况下,当某跃层的垂直分布自上向下依次递 减时,强度取正号,并称之为正常跃层(正跃层);反 之取负号,称之为逆跃层。 海洋中各主要跃层对水 下航行器的影响主要在安全性及隐蔽性上,例如,跃 ·318· 智 能 系 统 学 报 第 10 卷