正在加载图片...
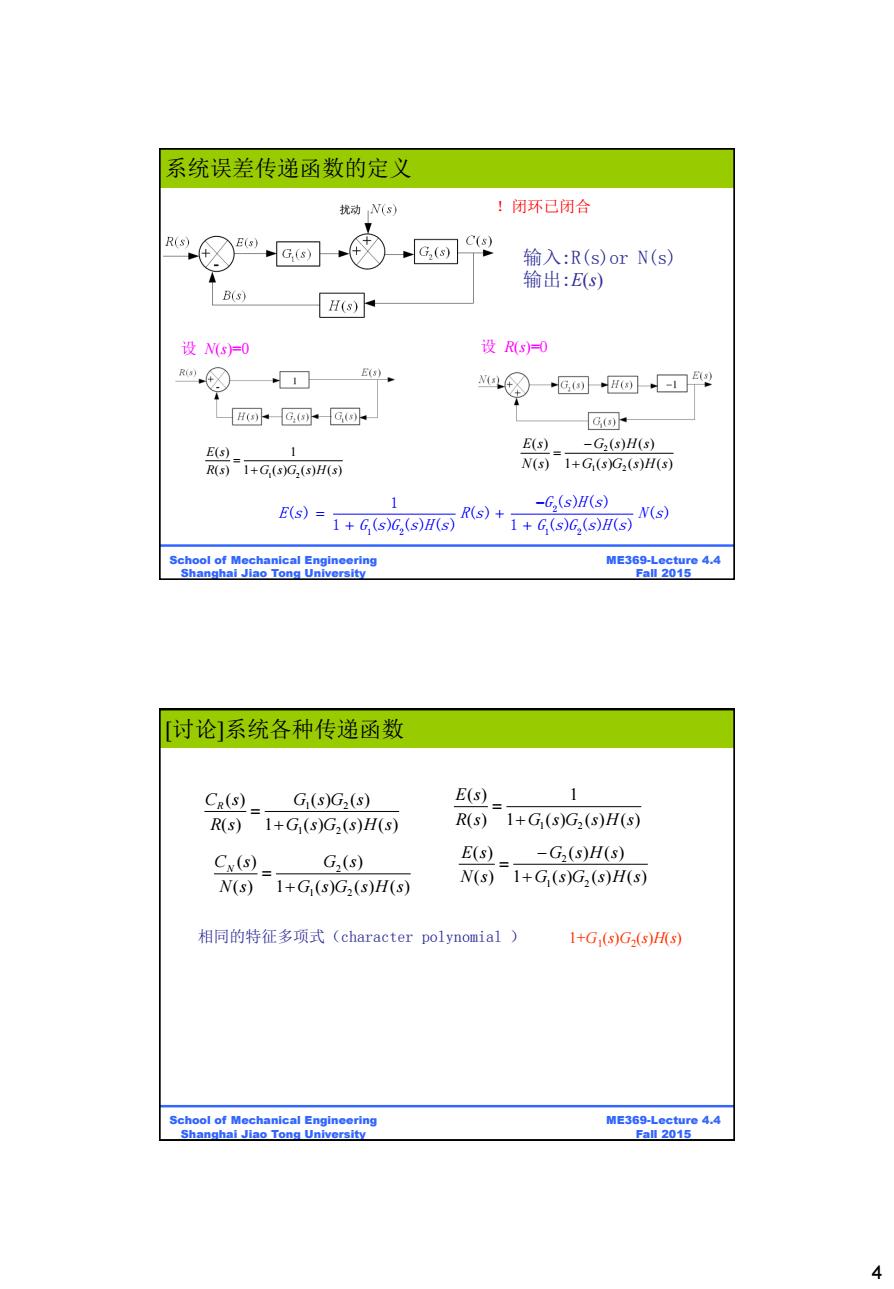
系统误差传递函数的定义 扰动W(s) !闭环已闭合 R(s) E(s) C(s) -G(S 输入:R(s)orN(s) 输出:E(s) B(s) H(s) 设N(s=0 设R(s=O E(s) 回回限 H)G,间小G间 GO E(s) E(s) -G2(s)H(s) R(s)1+G,(s)G,(s)H(s) N(s)1+G(s)G2(s)H(s) E(s)= 1 -G,(s)H(s) N(s) 1+G(s)G,(s)H(s) R(s)+G(s)G,(5)H(s) School of Mechanical Engineering ME369-Lecture 4.4 Shanghai Jiao Tong University Fall 2015 讨论]系统各种传递函数 CR(s) G(s)G,(s) E(s) 1 R(s)1+G(s)G,(s)H(s) R(s)1+G(s)G2(s)H(s) C(s) G,(s) E(s) -G2(s)H(s) N(s)1+G(s)G2(s)H(s) N(s)1+G(s)G2(s)H(s) 相同的特征多项式(character polynomial) 1+G(s)Gz(s)H(s) School of Mechanical Engineering ME369-Lecture 4.4 Shanghai Jiao Tong University Fall 2015 44 ME369-Lecture 4.4 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 输入:R(s)or N(s) 输出:E(s) 系统误差传递函数的定义 !闭环已闭合 1 2 ( ) 1 ( ) 1 ( ) ( ) ( ) E s R s G s G s H s 设 R(s)=0 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 2 2 G s G s H s G s H s N s E s 2 1 2 1 2 1 ( ) ( ) ( ) ( ) ( ) 1 ( ) ( ) ( ) 1 ( ) ( ) ( ) G s H s E s R s N s G s G s H s G s G s H s 设 N(s)=0 ME369-Lecture 4.4 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 相同的特征多项式(character polynomial ) 1+G1 (s)G2 (s)H(s) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 2 1 2 G s G s H s G s G s R s C s R 1 ( ) ( ) ( ) ( ) ( ) ( ) 1 2 2 G s G s H s G s N s C s N 1 ( ) ( ) ( ) 1 ( ) ( ) 1 2 R s G s G s H s E s 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 2 2 G s G s H s G s H s N s E s [讨论]系统各种传递函数