正在加载图片...
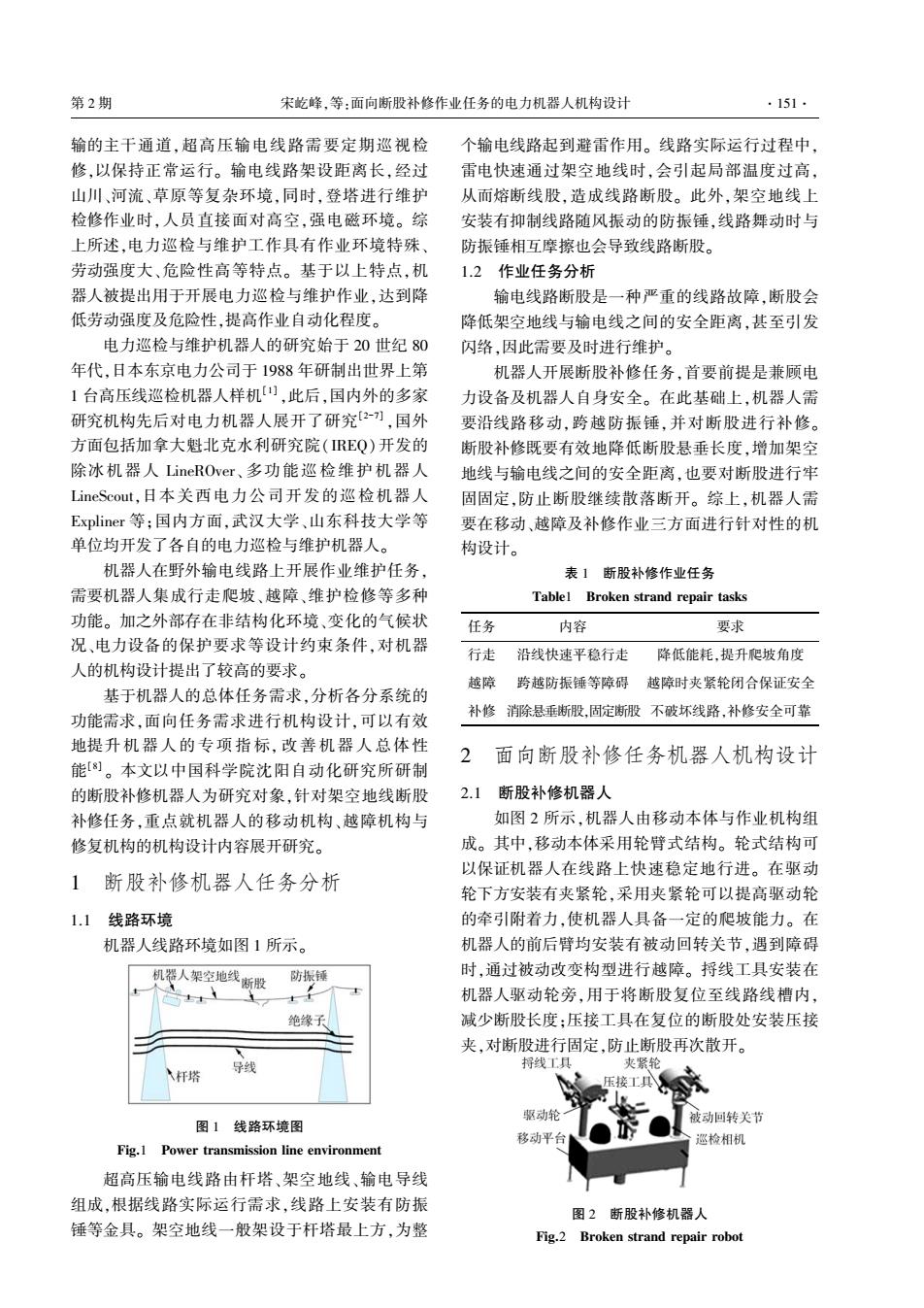
第2期 宋屹峰,等:面向断股补修作业任务的电力机器人机构设计 ·151· 输的主干通道,超高压输电线路需要定期巡视检 个输电线路起到避雷作用。线路实际运行过程中, 修,以保持正常运行。输电线路架设距离长,经过 雷电快速通过架空地线时,会引起局部温度过高, 山川、河流、草原等复杂环境,同时,登塔进行维护 从而熔断线股,造成线路断股。此外,架空地线上 检修作业时,人员直接面对高空,强电磁环境。综 安装有抑制线路随风振动的防振锤,线路舞动时与 上所述,电力巡检与维护工作具有作业环境特殊、 防振锤相互摩擦也会导致线路断股。 劳动强度大、危险性高等特点。基于以上特点,机 1.2作业任务分析 器人被提出用于开展电力巡检与维护作业,达到降 输电线路断股是一种严重的线路故障,断股会 低劳动强度及危险性,提高作业自动化程度。 降低架空地线与输电线之间的安全距离,甚至引发 电力巡检与维护机器人的研究始于20世纪80 闪络,因此需要及时进行维护。 年代,日本东京电力公司于1988年研制出世界上第 机器人开展断股补修任务,首要前提是兼顾电 1台高压线巡检机器人样机山,此后,国内外的多家 力设备及机器人自身安全。在此基础上,机器人需 研究机构先后对电力机器人展开了研究[2刃,国外 要沿线路移动,跨越防振锤,并对断股进行补修。 方面包括加拿大魁北克水利研究院(REQ)开发的 断股补修既要有效地降低断股悬垂长度,增加架空 除冰机器人LineROver、多功能巡检维护机器人 地线与输电线之间的安全距离,也要对断股进行牢 LineScout,.日本关西电力公司开发的巡检机器人 固固定,防止断股继续散落断开。综上,机器人需 Expliner等;国内方面,武汉大学、山东科技大学等 要在移动、越障及补修作业三方面进行针对性的机 单位均开发了各自的电力巡检与维护机器人。 构设计。 机器人在野外输电线路上开展作业维护任务, 表1断股补修作业任务 需要机器人集成行走爬坡、越障、维护检修等多种 Tablel Broken strand repair tasks 功能。加之外部存在非结构化环境、变化的气候状 任务 内容 要求 况、电力设备的保护要求等设计约束条件,对机器 行走 沿线快速平稳行走 降低能耗,提升爬坡角度 人的机构设计提出了较高的要求。 越障 跨越防振锤等障碍 越障时夹紧轮闭合保证安全 基于机器人的总体任务需求,分析各分系统的 补修消除悬垂断股,固定断股不破坏线路,补修安全可靠 功能需求,面向任务需求进行机构设计,可以有效 地提升机器人的专项指标,改善机器人总体性 2 面向断股补修任务机器人机构设计 能[)。本文以中国科学院沈阳自动化研究所研制 的断股补修机器人为研究对象,针对架空地线断股 2.1断股补修机器人 补修任务,重点就机器人的移动机构、越障机构与 如图2所示,机器人由移动本体与作业机构组 修复机构的机构设计内容展开研究。 成。其中,移动本体采用轮臂式结构。轮式结构可 以保证机器人在线路上快速稳定地行进。在驱动 1 断股补修机器人任务分析 轮下方安装有夹紧轮,采用夹紧轮可以提高驱动轮 1.1线路环境 的牵引附着力,使机器人具备一定的爬坡能力。在 机器人线路环境如图1所示。 机器人的前后臂均安装有被动回转关节,遇到障碍 机器人架空地线断股 防振锤 时,通过被动改变构型进行越障。捋线工具安装在 机器人驱动轮旁,用于将断股复位至线路线槽内, 绝缘子 减少断股长度:压接工具在复位的断股处安装压接 夹,对断股进行固定,防止断股再次散开。 导线 捋线工具 夹紧轮 气杆塔 压接工具 驱动轮 图1线路环境图 被动回转关节 移动平台 巡检相机 Fig.1 Power transmission line environment 超高压输电线路由杆塔、架空地线、输电导线 组成,根据线路实际运行需求,线路上安装有防振 图2断股补修机器人 锤等金具。架空地线一般架设于杆塔最上方,为整 Fig.2 Broken strand repair robot输的主干通道袁超高压输电线路需要定期巡视检 修袁以保持正常运行遥 输电线路架设距离长袁经过 山川尧河流尧草原等复杂环境袁同时袁登塔进行维护 检修作业时袁人员直接面对高空袁强电磁环境遥 综 上所述袁电力巡检与维护工作具有作业环境特殊尧 劳动强度大尧危险性高等特点遥 基于以上特点袁机 器人被提出用于开展电力巡检与维护作业袁达到降 低劳动强度及危险性袁提高作业自动化程度遥 电力巡检与维护机器人的研究始于 圆园 世纪 愿园 年代袁日本东京电力公司于 员怨愿愿 年研制出世界上第 员 台高压线巡检机器人样机咱员暂 袁此后袁国内外的多家 研究机构先后对电力机器人展开了研究咱圆原苑暂 袁国外 方面包括加拿大魁北克水利研究院渊 陨砸耘匝冤开发的 除冰机器人 蕴蚤灶藻砸韵增藻则尧 多功能巡检维护机器人 蕴蚤灶藻杂糟燥怎贼袁日本关西电力公司开发的巡检机器人 耘曾责造蚤灶藻则 等曰国内方面袁武汉大学尧山东科技大学等 单位均开发了各自的电力巡检与维护机器人遥 机器人在野外输电线路上开展作业维护任务袁 需要机器人集成行走爬坡尧越障尧维护检修等多种 功能遥 加之外部存在非结构化环境尧变化的气候状 况尧电力设备的保护要求等设计约束条件袁对机器 人的机构设计提出了较高的要求遥 基于机器人的总体任务需求袁分析各分系统的 功能需求袁面向任务需求进行机构设计袁可以有效 地提升机器人的专项指标袁 改善机器人总体性 能咱愿暂 遥 本文以中国科学院沈阳自动化研究所研制 的断股补修机器人为研究对象袁针对架空地线断股 补修任务袁重点就机器人的移动机构尧越障机构与 修复机构的机构设计内容展开研究遥 员摇 断股补修机器人任务分析 员援员摇 线路环境 机器人线路环境如图 员 所示遥 图 员摇 线路环境图 云蚤早援员摇 孕燥憎藻则 贼则葬灶泽皂蚤泽泽蚤燥灶 造蚤灶藻 藻灶增蚤则燥灶皂藻灶贼 摇 摇 超高压输电线路由杆塔尧架空地线尧输电导线 组成袁根据线路实际运行需求袁线路上安装有防振 锤等金具遥 架空地线一般架设于杆塔最上方袁为整 个输电线路起到避雷作用遥 线路实际运行过程中袁 雷电快速通过架空地线时袁会引起局部温度过高袁 从而熔断线股袁造成线路断股遥 此外袁架空地线上 安装有抑制线路随风振动的防振锤袁线路舞动时与 防振锤相互摩擦也会导致线路断股遥 员援圆摇 作业任务分析 输电线路断股是一种严重的线路故障袁断股会 降低架空地线与输电线之间的安全距离袁甚至引发 闪络袁因此需要及时进行维护遥 机器人开展断股补修任务袁首要前提是兼顾电 力设备及机器人自身安全遥 在此基础上袁机器人需 要沿线路移动袁跨越防振锤袁并对断股进行补修遥 断股补修既要有效地降低断股悬垂长度袁增加架空 地线与输电线之间的安全距离袁也要对断股进行牢 固固定袁防止断股继续散落断开遥 综上袁机器人需 要在移动尧越障及补修作业三方面进行针对性的机 构设计遥 表 员摇 断股补修作业任务 栽葬遭造藻员摇 月则燥噪藻灶 泽贼则葬灶凿 则藻责葬蚤则 贼葬泽噪泽 任务 内容 要求 行走 沿线快速平稳行走 降低能耗袁提升爬坡角度 越障 跨越防振锤等障碍 越障时夹紧轮闭合保证安全 补修 消除悬垂断股袁固定断股 不破坏线路袁补修安全可靠 圆摇 面向断股补修任务机器人机构设计 圆援员摇 断股补修机器人 如图 圆 所示袁机器人由移动本体与作业机构组 成遥 其中袁移动本体采用轮臂式结构遥 轮式结构可 以保证机器人在线路上快速稳定地行进遥 在驱动 轮下方安装有夹紧轮袁采用夹紧轮可以提高驱动轮 的牵引附着力袁使机器人具备一定的爬坡能力遥 在 机器人的前后臂均安装有被动回转关节袁遇到障碍 时袁通过被动改变构型进行越障遥 捋线工具安装在 机器人驱动轮旁袁用于将断股复位至线路线槽内袁 减少断股长度曰压接工具在复位的断股处安装压接 夹袁对断股进行固定袁防止断股再次散开遥 图 圆摇 断股补修机器人 云蚤早援圆摇 月则燥噪藻灶 泽贼则葬灶凿 则藻责葬蚤则 则燥遭燥贼 第 圆 期摇摇摇摇摇摇摇摇摇摇摇摇 宋屹峰袁等院面向断股补修作业任务的电力机器人机构设计 窑员缘员窑