点击下载:上海交通大学:《力学仿生——启示与探索》课程教学资源(专利资料)陆地仿生(2015)一种基于仿生触角的机器人自主导航方法
正在加载图片...
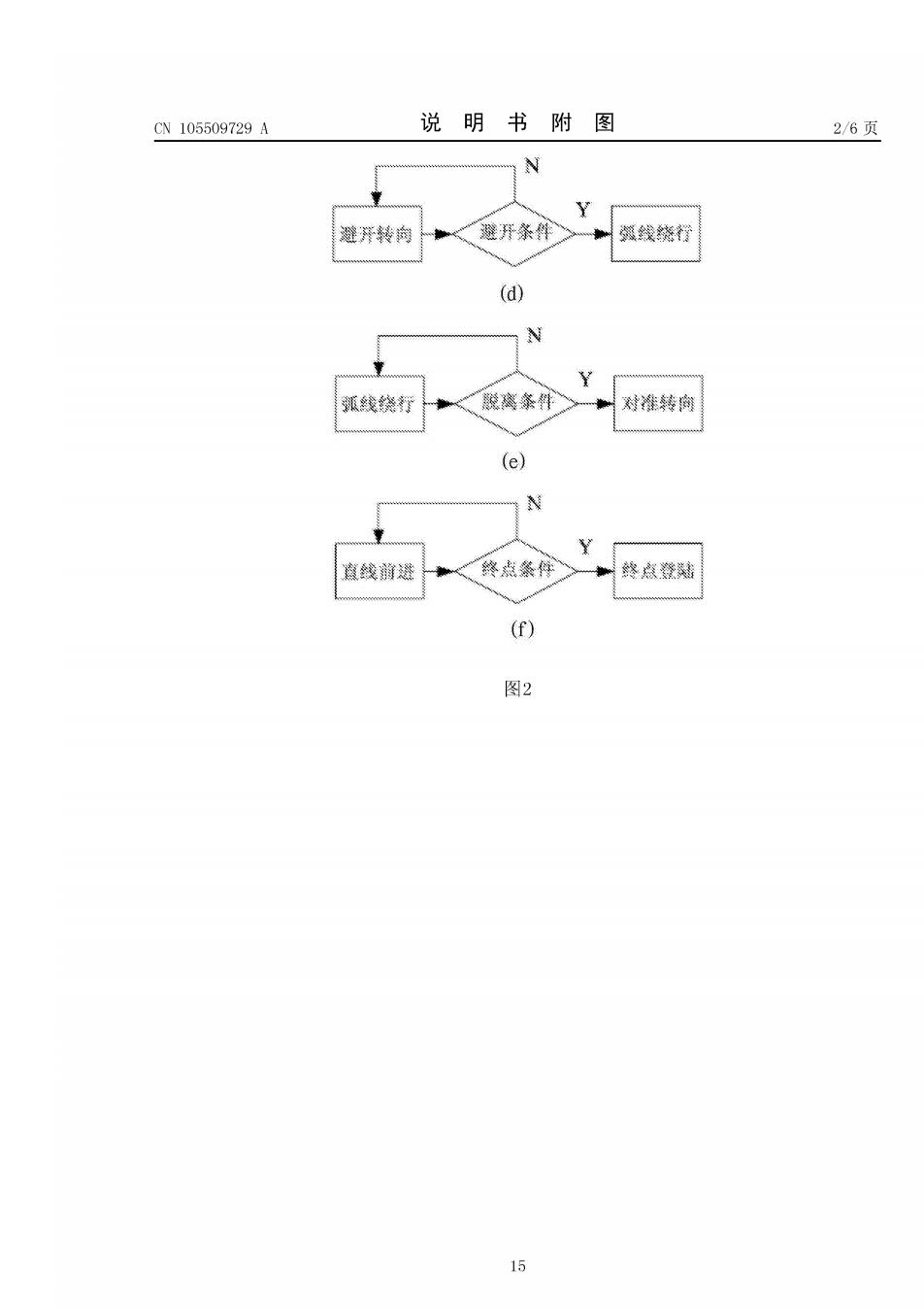
CN105509729A 说明书附图 2/6页 N 避葉转胸 避形条辫… 线鳞清 (d) N 派线绕新 酸祥 对裤转胸 (e) 道线润避 終点茶 然点發 (f) 图2 15
<<向上翻页
向下翻页>>
点击下载:上海交通大学:《力学仿生——启示与探索》课程教学资源(专利资料)陆地仿生(2015)一种基于仿生触角的机器人自主导航方法
©2008-现在 cucdc.com 高等教育资讯网 版权所有