正在加载图片...
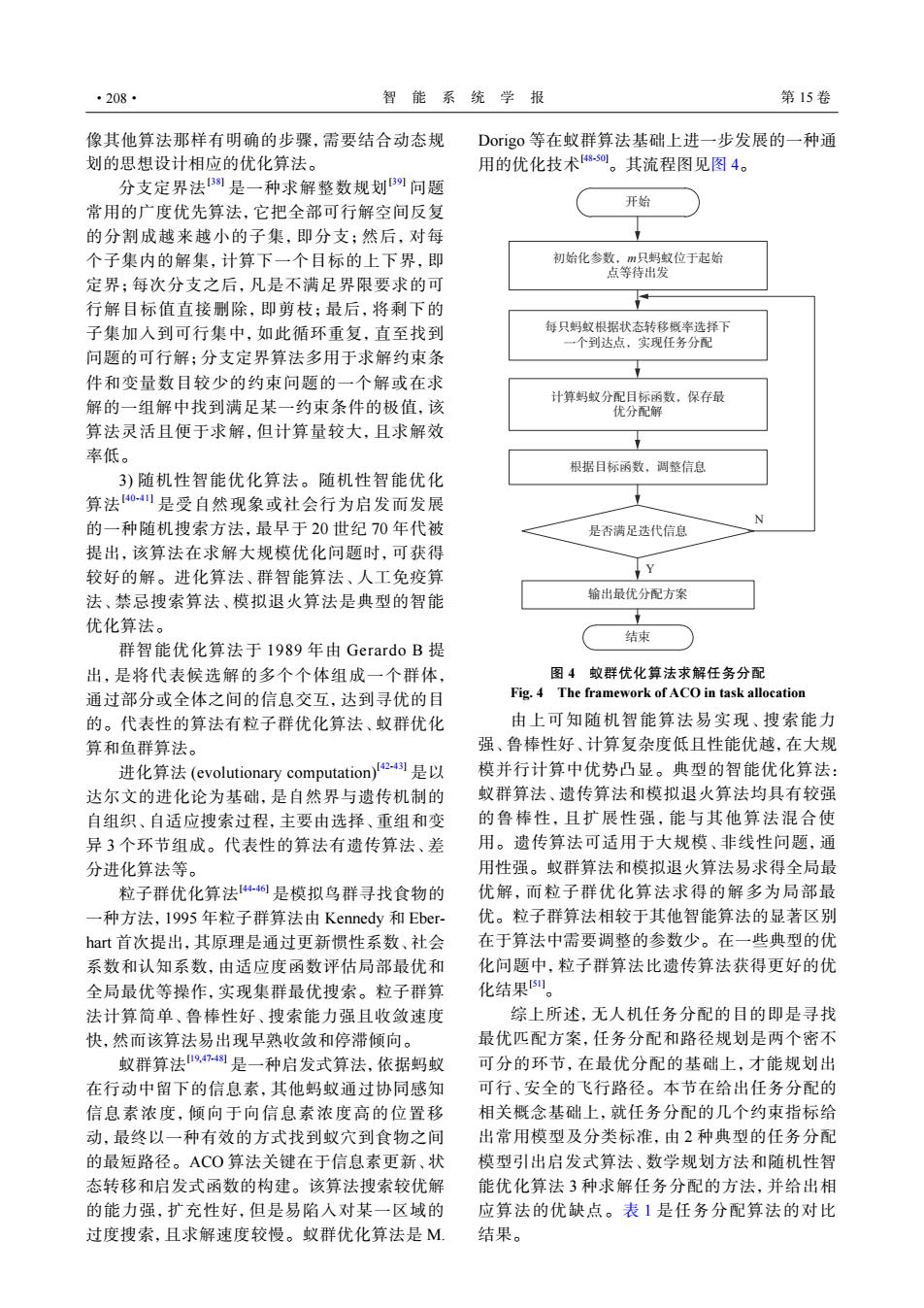
·208· 智能系统学报 第15卷 像其他算法那样有明确的步骤,需要结合动态规 Dorigo等在蚁群算法基础上进一步发展的一种通 划的思想设计相应的优化算法。 用的优化技术s0。其流程图见图4。 分支定界法B是一种求解整数规划B问题 常用的广度优先算法,它把全部可行解空间反复 开始 的分割成越来越小的子集,即分支;然后,对每 个子集内的解集,计算下一个目标的上下界,即 初始化参数,m只蚂蚁位于起始 点等待出发 定界;每次分支之后,凡是不满足界限要求的可 行解目标值直接删除,即剪枝;最后,将剩下的 日 子集加入到可行集中,如此循环重复,直至找到 每只蚂蚁根据状态转移概率选择下 一个到达点,实现任务分配 问题的可行解;分支定界算法多用于求解约束条 件和变量数目较少的约束问题的一个解或在求 计算蚂蚁分配目标函数.保存最 解的一组解中找到满足某一约束条件的极值,该 优分配解 算法灵活且便于求解,但计算量较大,且求解效 率低。 根据目标函数,调整信息 3)随机性智能优化算法。随机性智能优化 算法)是受自然现象或社会行为启发而发展 的一种随机搜索方法,最早于20世纪70年代被 是否满足迭代信息 提出,该算法在求解大规模优化问题时,可获得 较好的解。进化算法、群智能算法、人工免疫算 y 法、禁忌搜索算法、模拟退火算法是典型的智能 输出最优分配方案 优化算法。 结束 群智能优化算法于1989年由Gerardo B提 出,是将代表候选解的多个个体组成一个群体, 图4蚊群优化算法求解任务分配 通过部分或全体之间的信息交互,达到寻优的目 Fig.4 The framework of ACO in task allocation 的。代表性的算法有粒子群优化算法、蚁群优化 由上可知随机智能算法易实现、搜索能力 算和鱼群算法。 强、鲁棒性好、计算复杂度低且性能优越,在大规 进化算法(evolutionary computation)241是以 模并行计算中优势凸显。典型的智能优化算法: 达尔文的进化论为基础,是自然界与遗传机制的 蚁群算法、遗传算法和模拟退火算法均具有较强 自组织、自适应搜索过程,主要由选择、重组和变 的鲁棒性,且扩展性强,能与其他算法混合使 异3个环节组成。代表性的算法有遗传算法、差 用。遗传算法可适用于大规模、非线性问题,通 分进化算法等。 用性强。蚁群算法和模拟退火算法易求得全局最 粒子群优化算法46是模拟鸟群寻找食物的 优解,而粒子群优化算法求得的解多为局部最 一种方法,1995年粒子群算法由Kennedy和Eber- 优。粒子群算法相较于其他智能算法的显著区别 hart首次提出,其原理是通过更新惯性系数、社会 在于算法中需要调整的参数少。在一些典型的优 系数和认知系数,由适应度函数评估局部最优和 化问题中,粒子群算法比遗传算法获得更好的优 全局最优等操作,实现集群最优搜索。粒子群算 化结果倒。 法计算简单、鲁棒性好、搜索能力强且收敛速度 综上所述,无人机任务分配的目的即是寻找 快,然而该算法易出现早熟收敛和停滞倾向。 最优匹配方案,任务分配和路径规划是两个密不 蚁群算法974是一种启发式算法,依据蚂蚁 可分的环节,在最优分配的基础上,才能规划出 在行动中留下的信息素,其他蚂蚁通过协同感知 可行、安全的飞行路径。本节在给出任务分配的 信息素浓度,倾向于向信息素浓度高的位置移 相关概念基础上,就任务分配的几个约束指标给 动,最终以一种有效的方式找到蚁穴到食物之间 出常用模型及分类标准,由2种典型的任务分配 的最短路径。ACO算法关键在于信息素更新、状 模型引出启发式算法、数学规划方法和随机性智 态转移和启发式函数的构建。该算法搜索较优解 能优化算法3种求解任务分配的方法,并给出相 的能力强,扩充性好,但是易陷入对某一区域的 应算法的优缺点。表1是任务分配算法的对比 过度搜索,且求解速度较慢。蚁群优化算法是M 结果。像其他算法那样有明确的步骤,需要结合动态规 划的思想设计相应的优化算法。 分支定界法[38] 是一种求解整数规划[39] 问题 常用的广度优先算法,它把全部可行解空间反复 的分割成越来越小的子集,即分支;然后,对每 个子集内的解集,计算下一个目标的上下界,即 定界;每次分支之后,凡是不满足界限要求的可 行解目标值直接删除,即剪枝;最后,将剩下的 子集加入到可行集中,如此循环重复,直至找到 问题的可行解;分支定界算法多用于求解约束条 件和变量数目较少的约束问题的一个解或在求 解的一组解中找到满足某一约束条件的极值,该 算法灵活且便于求解,但计算量较大,且求解效 率低。 3) 随机性智能优化算法。随机性智能优化 算法[40-41] 是受自然现象或社会行为启发而发展 的一种随机搜索方法,最早于 20 世纪 70 年代被 提出,该算法在求解大规模优化问题时,可获得 较好的解。进化算法、群智能算法、人工免疫算 法、禁忌搜索算法、模拟退火算法是典型的智能 优化算法。 群智能优化算法于 1989 年由 Gerardo B 提 出,是将代表候选解的多个个体组成一个群体, 通过部分或全体之间的信息交互,达到寻优的目 的。代表性的算法有粒子群优化算法、蚁群优化 算和鱼群算法。 进化算法 (evolutionary computation)[42-43] 是以 达尔文的进化论为基础,是自然界与遗传机制的 自组织、自适应搜索过程,主要由选择、重组和变 异 3 个环节组成。代表性的算法有遗传算法、差 分进化算法等。 粒子群优化算法[44-46] 是模拟鸟群寻找食物的 一种方法,1995 年粒子群算法由 Kennedy 和 Eberhart 首次提出,其原理是通过更新惯性系数、社会 系数和认知系数,由适应度函数评估局部最优和 全局最优等操作,实现集群最优搜索。粒子群算 法计算简单、鲁棒性好、搜索能力强且收敛速度 快,然而该算法易出现早熟收敛和停滞倾向。 蚁群算法[19,47-48] 是一种启发式算法,依据蚂蚁 在行动中留下的信息素,其他蚂蚁通过协同感知 信息素浓度,倾向于向信息素浓度高的位置移 动,最终以一种有效的方式找到蚁穴到食物之间 的最短路径。ACO 算法关键在于信息素更新、状 态转移和启发式函数的构建。该算法搜索较优解 的能力强,扩充性好,但是易陷入对某一区域的 过度搜索,且求解速度较慢。蚁群优化算法是 M. Dorigo 等在蚁群算法基础上进一步发展的一种通 用的优化技术[48-50]。其流程图见图 4。 开始 初始化参数,m只蚂蚁位于起始 点等待出发 计算蚂蚁分配目标函数,保存最 优分配解 每只蚂蚁根据状态转移概率选择下 一个到达点,实现任务分配 根据目标函数,调整信息 是否满足迭代信息 输出最优分配方案 结束 Y N 图 4 蚁群优化算法求解任务分配 Fig. 4 The framework of ACO in task allocation 由上可知随机智能算法易实现、搜索能力 强、鲁棒性好、计算复杂度低且性能优越,在大规 模并行计算中优势凸显。典型的智能优化算法: 蚁群算法、遗传算法和模拟退火算法均具有较强 的鲁棒性,且扩展性强,能与其他算法混合使 用。遗传算法可适用于大规模、非线性问题,通 用性强。蚁群算法和模拟退火算法易求得全局最 优解,而粒子群优化算法求得的解多为局部最 优。粒子群算法相较于其他智能算法的显著区别 在于算法中需要调整的参数少。在一些典型的优 化问题中,粒子群算法比遗传算法获得更好的优 化结果[51]。 综上所述,无人机任务分配的目的即是寻找 最优匹配方案,任务分配和路径规划是两个密不 可分的环节,在最优分配的基础上,才能规划出 可行、安全的飞行路径。本节在给出任务分配的 相关概念基础上,就任务分配的几个约束指标给 出常用模型及分类标准,由 2 种典型的任务分配 模型引出启发式算法、数学规划方法和随机性智 能优化算法 3 种求解任务分配的方法,并给出相 应算法的优缺点。表 1 是任务分配算法的对比 结果。 ·208· 智 能 系 统 学 报 第 15 卷