正在加载图片...
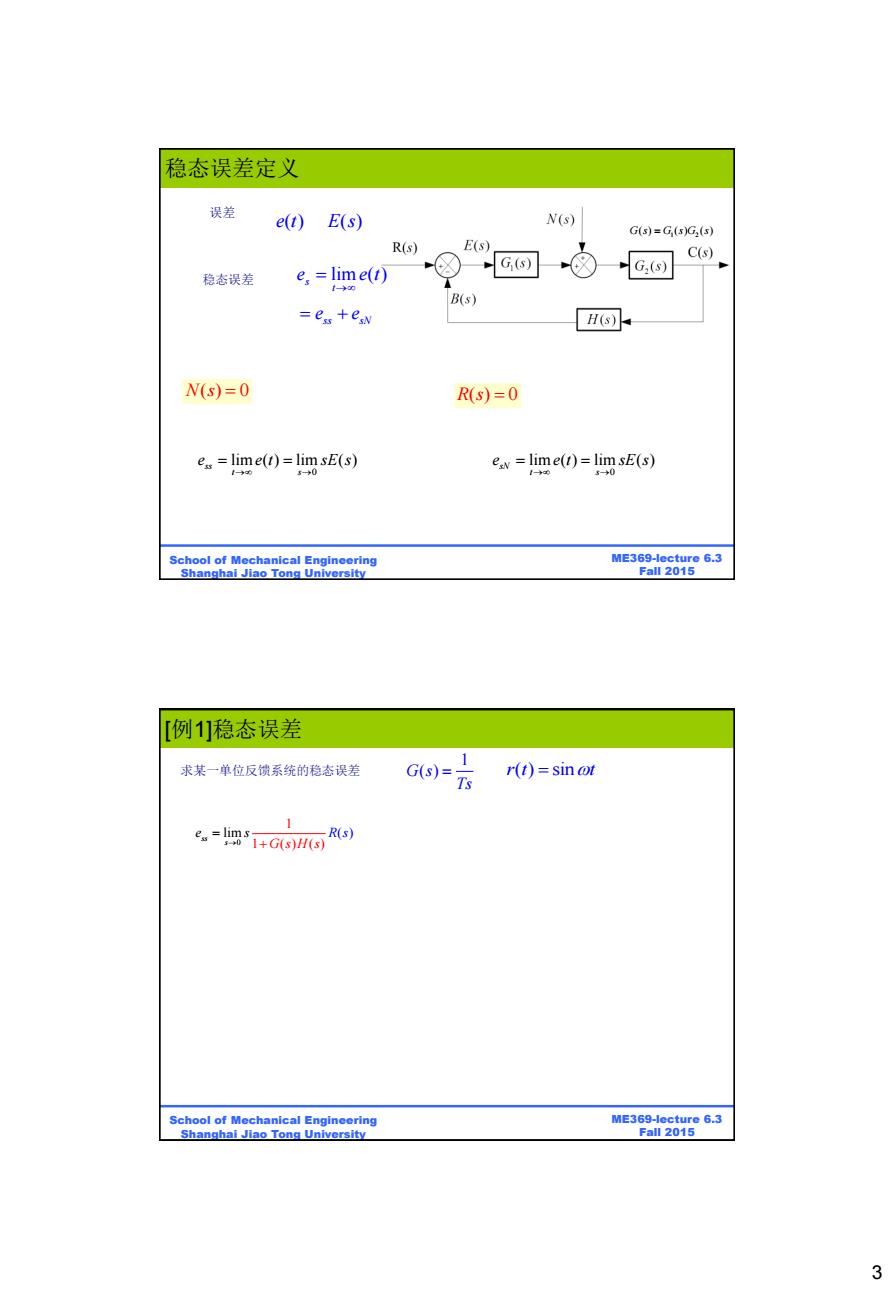
稳态误差定义 误差 e(t) E(s) N(s) G(s)=G(s)G,(s) R(s) E(s) C(s) 稳态误差 e,=lime(t) G(s) G,(s) B(s) =ess +esN H(s) N(s)=0 R(s)=0 es =lime(t)=limsE(s) ea lime(t)=limsE(s) 的 -U School of Mechanical Engineering ME369-lecture 6.3 Shanghai Jiao Tong University Fall 2015 [例1]稳态误差 求某一单位反馈系统的稳态误差 1 G(s)= Ts r(t)=sinot es=lims- -R(s) 01+Gs)H(s School of Mechanical Engineering ME369-lecture 6.3 Shanghai Jiao Tong University Fall 2015 33 ME369-lecture 6.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 0 lim ( ) lim ( ) ss t s e e t sE s 1 2 G s G s G s ( ) ( ) ( ) N s( ) 0 R s( ) 0 0 lim ( ) lim ( ) sN t s e e t sE s 稳态误差定义 误差 lim ( ) s t e e t 稳态误差 et( ) ss sN e e E s( ) ME369-lecture 6.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 G s( ) Ts 求某一单位反馈系统的稳态误差 r t t ( ) sin 0 1 1 im ( ) ) l ( ( ) ss s e G s H s s s R [例1]稳态误差