正在加载图片...
1.1 Definition of z-Transform 1.1 Definition of z-Transform 1.1 Definition of z-Transform Example上 Example2生 From the above two examples,we find that Calculate the ZT of x(n)=a"u(n) Calculate the ZT of x(n)=-a"u(-n-1) Very different time functions can have the Xe)=2x0=2a2=2(e xe=-42”-2( same z-transform.Because ROC plays an 0 important role in computing the z-transform 1-, =2(m=(a2= or inverse z-transform. 2-a Note that the above equation holds only for .So we must specify not only the z-transform Note that the above equation holds only for az<1, ie> i<a corresponding to a time function,but its ROC as well. Region of convergence Region of convergence 20 1.2 Rational z-Transform 1.2 Rational z-Transform 1.2 Rational z-Transform In the case of LTI discrete-time systems we .The degree of the numerator polynomial P(z) A rational z-transform can be alternatively are concerned with in this course,all involved is M and the degree of the denominator written in factored form as z-transforms are rational functions of polynomial D(z)is N That is,they are ratios of two polynomials in An alternate representation of a rational z- Ge=凸Π1-5) transform is as a ratio of two polynomials in z: dΠ-4z G()=P()=+p+py Ge=nP“+n++p2tu do2+dza+…dw-2+dw- =zw凸Π(2-) D() d。+d2+-dw-2a0+dw-2 d。Πa(2-】19 1. 1 Definition of z-Transform Calculate the ZT of Note that the above equation holds only for , i.e. 1 az 1 z a Region of convergence
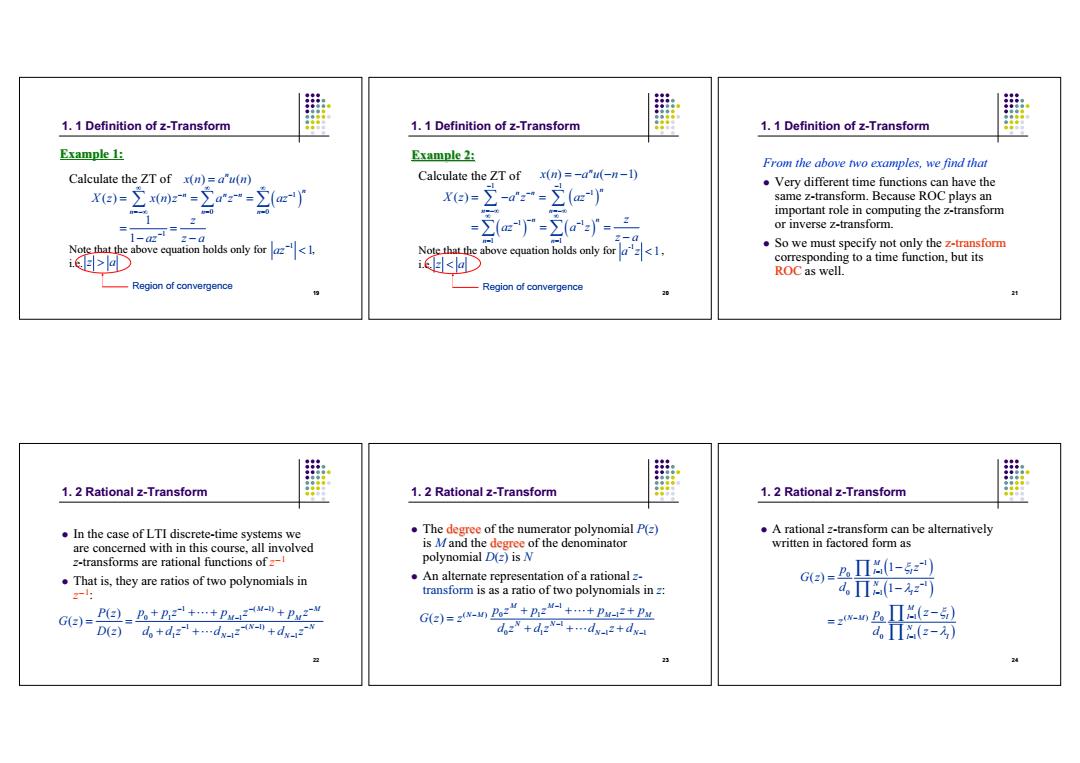
1 0 0 1 () () 1 1 n n nn n nn X z x n z a z az z az z a Example 1: Example 1: () () n x n aun 20 1. 1 Definition of z-Transform Calculate the ZT of Note that the above equation holds only for , i.e. -1 a z 1 z a Region of convergence
1 1 1 1 1 1 1 ( ) n n n n n n n n n X z a z az z az a z z a Example 2: Example 2: ( ) ( 1) n xn au n 21 1. 1 Definition of z-Transform From the above two examples, we find that Very different time functions can have the same z-transform. Because ROC plays an important role in computing the z-transform or inverse z-transform. So we must specify not only the z-transform corresponding to a time function, but its ROC as well. 22 1. 2 Rational z-Transform In the case of LTI discrete-time systems we are concerned with in this course, all involved z-transforms are rational functions of zˉ1 That is, they are ratios of two polynomials in zˉ1: 1 ( 1) 01 1 1 ( 1) 01 1 1 ( ) ( ) ( ) M M M M N N N N P z p pz p z p z G z Dz d dz d z d z 23 1. 2 Rational z-Transform The degree of the numerator polynomial P(z) is M and the degree of the denominator polynomial D(z) is N An alternate representation of a rational ztransform is as a ratio of two polynomials in z: 1 ( ) 01 1 1 01 1 1 ( ) M M N M M M N N N N p z pz p z p Gz z dz dz d z d 24 1. 2 Rational z-Transform A rational z-transform can be alternatively written in factored form as
1 1 0 1 0 1 ( ) 0 1 0 1 1 ( ) 1 M l l N l l M N M l l N l l p z G z d z p z z d z �������������������