正在加载图片...
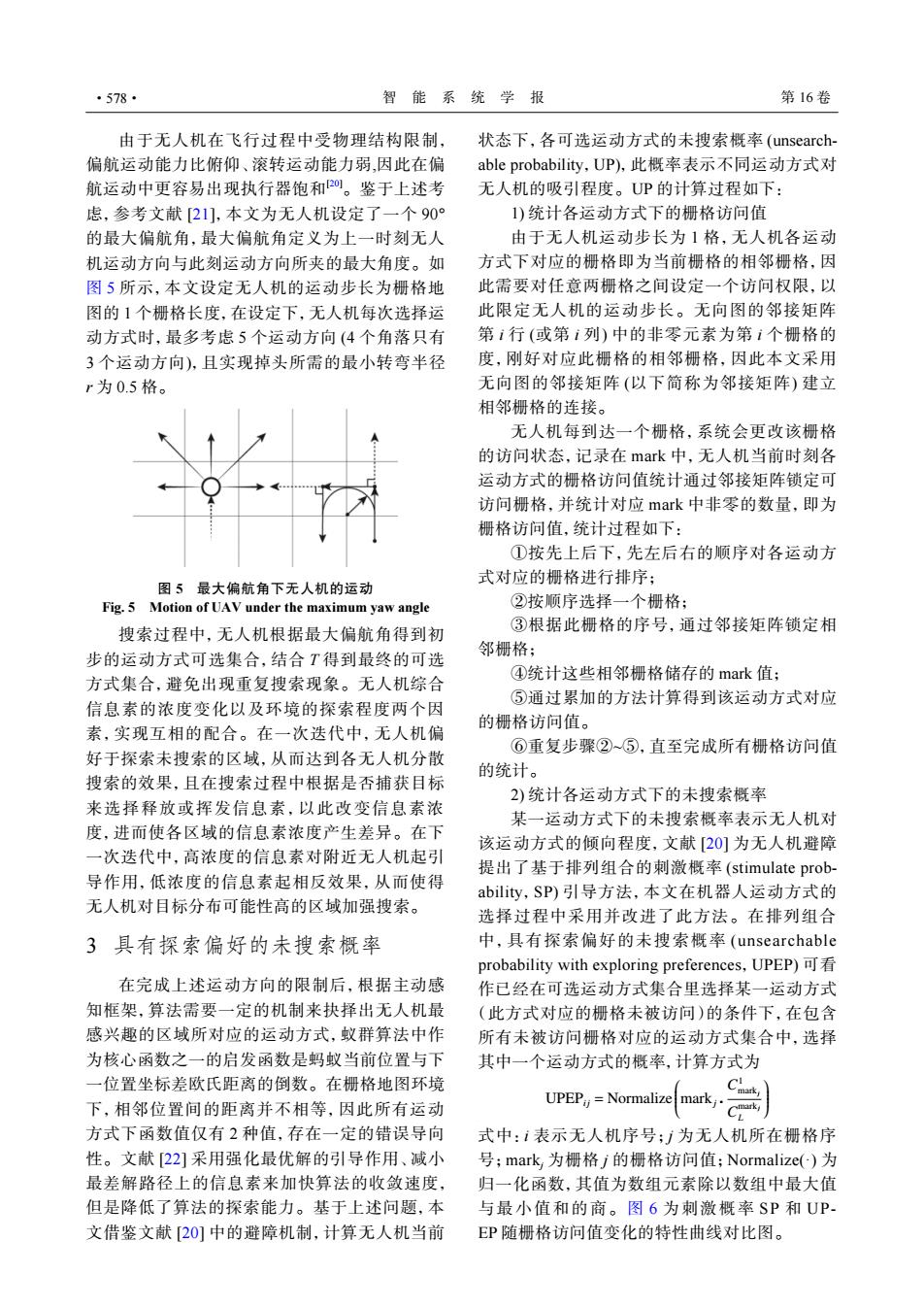
·578· 智能系统学报 第16卷 由于无人机在飞行过程中受物理结构限制, 状态下,各可选运动方式的未搜索概率(unsearch- 偏航运动能力比俯仰、滚转运动能力弱,因此在偏 able probability,UP),此概率表示不同运动方式对 航运动中更容易出现执行器饱和20。鉴于上述考 无人机的吸引程度。UP的计算过程如下: 虑,参考文献[21],本文为无人机设定了一个90 1)统计各运动方式下的栅格访问值 的最大偏航角,最大偏航角定义为上一时刻无人 由于无人机运动步长为1格,无人机各运动 机运动方向与此刻运动方向所夹的最大角度。如方式下对应的栅格即为当前栅格的相邻栅格,因 图5所示,本文设定无人机的运动步长为栅格地 此需要对任意两栅格之间设定一个访问权限,以 图的1个栅格长度,在设定下,无人机每次选择运 此限定无人机的运动步长。无向图的邻接矩阵 动方式时,最多考虑5个运动方向(4个角落只有 第i行(或第i列)中的非零元素为第i个栅格的 3个运动方向),且实现掉头所需的最小转弯半径 度,刚好对应此栅格的相邻栅格,因此本文采用 r为0.5格。 无向图的邻接矩阵(以下简称为邻接矩阵)建立 相邻栅格的连接。 无人机每到达一个栅格,系统会更改该栅格 的访问状态,记录在mark中,无人机当前时刻各 运动方式的栅格访问值统计通过邻接矩阵锁定可 访问栅格,并统计对应mark中非零的数量,即为 栅格访问值,统计过程如下: ①按先上后下,先左后右的顺序对各运动方 式对应的栅格进行排序; 图5最大偏航角下无人机的运动 Fig.5 Motion of UAV under the maximum yaw angle ②按顺序选择一个栅格: ③根据此栅格的序号,通过邻接矩阵锁定相 搜索过程中,无人机根据最大偏航角得到初 步的运动方式可选集合,结合T得到最终的可选 邻栅格: 方式集合,避免出现重复搜索现象。无人机综合 ④统计这些相邻栅格储存的mark值; 信息素的浓度变化以及环境的探索程度两个因 ⑤通过累加的方法计算得到该运动方式对应 素,实现互相的配合。在一次迭代中,无人机偏 的栅格访问值。 ⑥重复步骤②~⑤,直至完成所有栅格访问值 好于探索未搜索的区域,从而达到各无人机分散 的统计。 搜索的效果,且在搜索过程中根据是否捕获目标 2)统计各运动方式下的未搜索概率 来选择释放或挥发信息素,以此改变信息素浓 某一运动方式下的未搜索概率表示无人机对 度,进而使各区域的信息素浓度产生差异。在下 该运动方式的倾向程度,文献[20]为无人机避障 一次迭代中,高浓度的信息素对附近无人机起引 提出了基于排列组合的刺激概率(stimulate prob- 导作用,低浓度的信息素起相反效果,从而使得 ability,SP)引导方法,本文在机器人运动方式的 无人机对目标分布可能性高的区域加强搜索。 选择过程中采用并改进了此方法。在排列组合 3具有探索偏好的未搜索概率 中,具有探索偏好的未搜索概率(unsearchable probability with exploring preferences,UPEP) 在完成上述运动方向的限制后,根据主动感 作已经在可选运动方式集合里选择某一运动方式 知框架,算法需要一定的机制来抉择出无人机最 (此方式对应的栅格未被访问)的条件下,在包含 感兴趣的区域所对应的运动方式,蚁群算法中作 所有未被访问栅格对应的运动方式集合中,选择 为核心函数之一的启发函数是蚂蚁当前位置与下 其中一个运动方式的概率,计算方式为 一位置坐标差欧氏距离的倒数。在栅格地图环境 下,相邻位置间的距离并不相等,因此所有运动 UPEP;;=Normalize 方式下函数值仅有2种值,存在一定的错误导向 式中:i表示无人机序号;为无人机所在栅格序 性。文献[22]采用强化最优解的引导作用、减小 号;mark为栅格j的栅格访问值;Normalize()为 最差解路径上的信息素来加快算法的收敛速度, 归一化函数,其值为数组元素除以数组中最大值 但是降低了算法的探索能力。基于上述问题,本 与最小值和的商。图6为刺激概率SP和UP 文借鉴文献[20]中的避障机制,计算无人机当前 EP随栅格访问值变化的特性曲线对比图。由于无人机在飞行过程中受物理结构限制, 偏航运动能力比俯仰、滚转运动能力弱,因此在偏 航运动中更容易出现执行器饱和[20]。鉴于上述考 虑,参考文献 [21],本文为无人机设定了一个 90° 的最大偏航角,最大偏航角定义为上一时刻无人 机运动方向与此刻运动方向所夹的最大角度。如 图 5 所示,本文设定无人机的运动步长为栅格地 图的 1 个栅格长度,在设定下,无人机每次选择运 动方式时,最多考虑 5 个运动方向 (4 个角落只有 3 个运动方向),且实现掉头所需的最小转弯半径 r 为 0.5 格。 图 5 最大偏航角下无人机的运动 Fig. 5 Motion of UAV under the maximum yaw angle 搜索过程中,无人机根据最大偏航角得到初 步的运动方式可选集合,结合 T 得到最终的可选 方式集合,避免出现重复搜索现象。无人机综合 信息素的浓度变化以及环境的探索程度两个因 素,实现互相的配合。在一次迭代中,无人机偏 好于探索未搜索的区域,从而达到各无人机分散 搜索的效果,且在搜索过程中根据是否捕获目标 来选择释放或挥发信息素,以此改变信息素浓 度,进而使各区域的信息素浓度产生差异。在下 一次迭代中,高浓度的信息素对附近无人机起引 导作用,低浓度的信息素起相反效果,从而使得 无人机对目标分布可能性高的区域加强搜索。 3 具有探索偏好的未搜索概率 在完成上述运动方向的限制后,根据主动感 知框架,算法需要一定的机制来抉择出无人机最 感兴趣的区域所对应的运动方式,蚁群算法中作 为核心函数之一的启发函数是蚂蚁当前位置与下 一位置坐标差欧氏距离的倒数。在栅格地图环境 下,相邻位置间的距离并不相等,因此所有运动 方式下函数值仅有 2 种值,存在一定的错误导向 性。文献 [22] 采用强化最优解的引导作用、减小 最差解路径上的信息素来加快算法的收敛速度, 但是降低了算法的探索能力。基于上述问题,本 文借鉴文献 [20] 中的避障机制,计算无人机当前 状态下,各可选运动方式的未搜索概率 (unsearchable probability,UP),此概率表示不同运动方式对 无人机的吸引程度。UP 的计算过程如下: 1) 统计各运动方式下的栅格访问值 由于无人机运动步长为 1 格,无人机各运动 方式下对应的栅格即为当前栅格的相邻栅格,因 此需要对任意两栅格之间设定一个访问权限,以 此限定无人机的运动步长。无向图的邻接矩阵 第 i 行 (或第 i 列) 中的非零元素为第 i 个栅格的 度,刚好对应此栅格的相邻栅格,因此本文采用 无向图的邻接矩阵 (以下简称为邻接矩阵) 建立 相邻栅格的连接。 无人机每到达一个栅格,系统会更改该栅格 的访问状态,记录在 mark 中,无人机当前时刻各 运动方式的栅格访问值统计通过邻接矩阵锁定可 访问栅格,并统计对应 mark 中非零的数量,即为 栅格访问值,统计过程如下: ①按先上后下,先左后右的顺序对各运动方 式对应的栅格进行排序; ②按顺序选择一个栅格; ③根据此栅格的序号,通过邻接矩阵锁定相 邻栅格; ④统计这些相邻栅格储存的 mark 值; ⑤通过累加的方法计算得到该运动方式对应 的栅格访问值。 ⑥重复步骤②~⑤,直至完成所有栅格访问值 的统计。 2) 统计各运动方式下的未搜索概率 某一运动方式下的未搜索概率表示无人机对 该运动方式的倾向程度,文献 [20] 为无人机避障 提出了基于排列组合的刺激概率 (stimulate probability,SP) 引导方法,本文在机器人运动方式的 选择过程中采用并改进了此方法。在排列组合 中,具有探索偏好的未搜索概率 (unsearchable probability with exploring preferences,UPEP) 可看 作已经在可选运动方式集合里选择某一运动方式 (此方式对应的栅格未被访问)的条件下,在包含 所有未被访问栅格对应的运动方式集合中,选择 其中一个运动方式的概率,计算方式为 UPEPi j = Normalize markj C 1 markj C markj L 式中:i 表示无人机序号;j 为无人机所在栅格序 号;markj 为栅格 j 的栅格访问值;Normalize(·) 为 归一化函数,其值为数组元素除以数组中最大值 与最小值和的商。图 6 为刺激概率 SP 和 UPEP 随栅格访问值变化的特性曲线对比图。 ·578· 智 能 系 统 学 报 第 16 卷