正在加载图片...
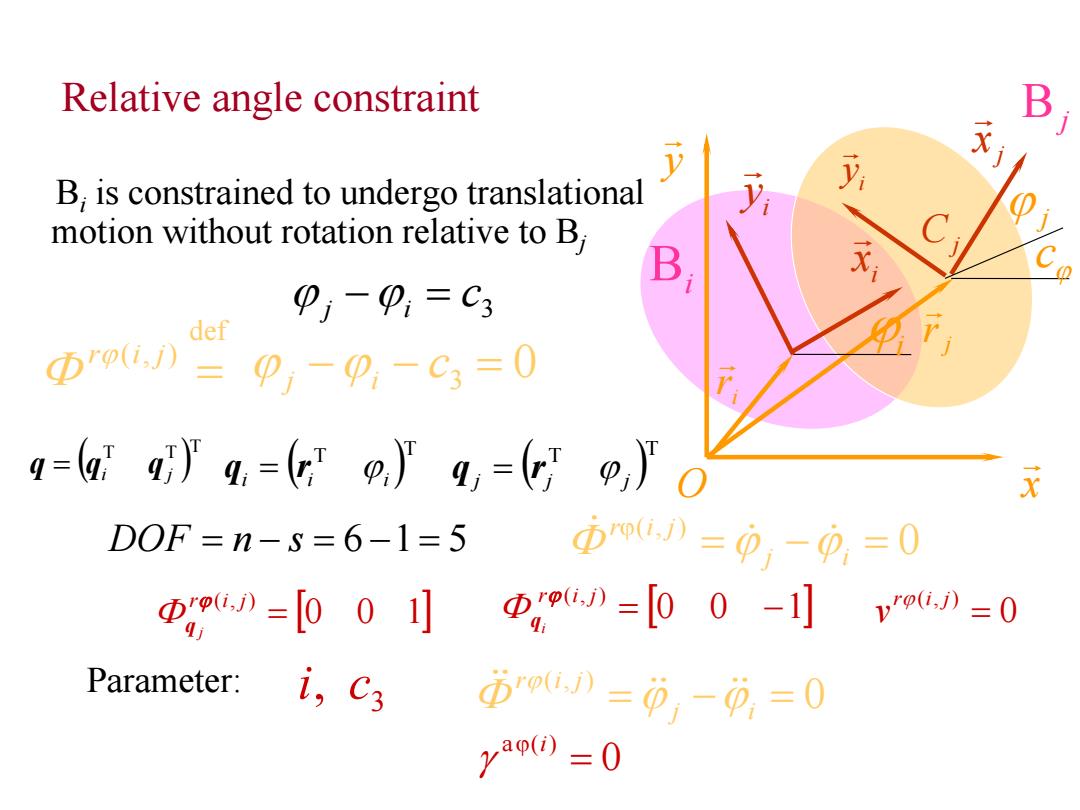
Relative angle constraint B B;is constrained to undergo translational motion without rotation relative to b B 01-p,=C3 def ro(i,j) =p,-p,-C3=0 g=ggy4,=(9,4,=69,0 x DOF=n-s=6-1=5 市9u,》=p,-p,=0 D,w=[00刂 Φ,》=[00-1 v'o,》=0 Parameter: i,C3 ro1》=0,-0,=0 ra(=0Relative angle constraint Bi is constrained to undergo translational motion without rotation relative to Bj j i c3 0 def ( , ) r i j 3 c j i • Velocity constraint equation 0 ( , ) j i r i j 0 ( , ) j i r i j 3 Parameter: i, c j r Bj y x O j x i y Cj j DOF n s 6 1 5 T T i i i q r 0 0 1 ( , ) r i j j q 0 a ( ) i 0 ( , ) r i j v T T j j j q r T T T q qi qj 0 0 1 ( , ) r i j i q i r i i x i y Bi c