正在加载图片...
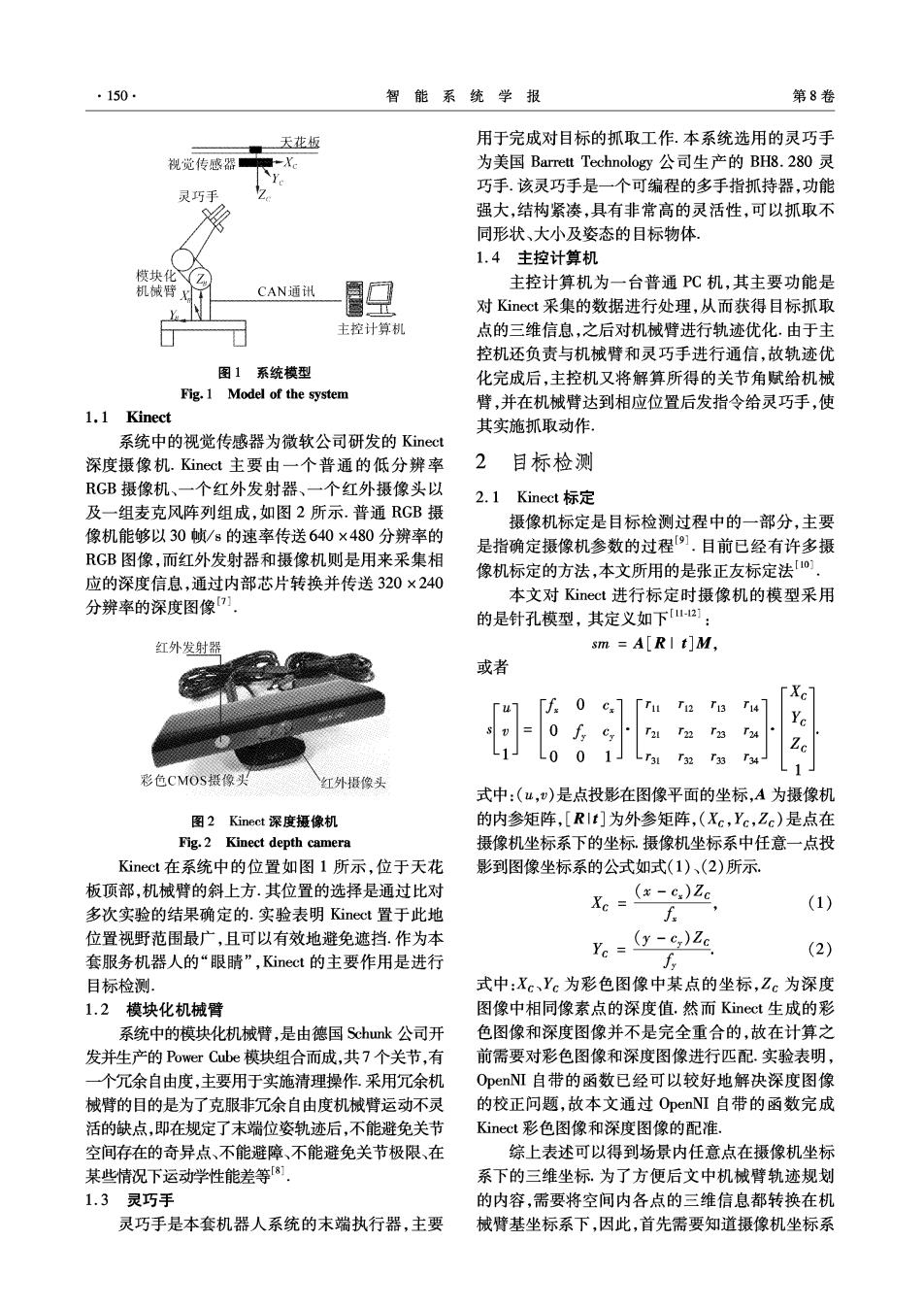
·150 智能系统学报 第8卷 天花板 用于完成对目标的抓取工作.本系统选用的灵巧手 视觉传感器■ 为美国Barrett Technology公司生产的BH8.280灵 巧手.该灵巧手是一个可编程的多手指抓持器,功能 灵巧手 强大,结构紧凑,具有非常高的灵活性,可以抓取不 同形状、大小及姿态的目标物体 1.4主控计算机 模块化 机械臂X CAN通讯 主控计算机为一台普通P℃机,其主要功能是 对Kinect采集的数据进行处理,从而获得目标抓取 主控计算机 点的三维信息,之后对机械臂进行轨迹优化.由于主 控机还负责与机械臂和灵巧手进行通信,故轨迹优 图1系统模型 化完成后,主控机又将解算所得的关节角赋给机械 Fig.1 Model of the system 臂,并在机械臂达到相应位置后发指令给灵巧手,使 1.1 Kinect 其实施抓取动作, 系统中的视觉传感器为微软公司研发的Kinect 深度摄像机.Kinect主要由一个普通的低分辨率 2目标检测 RGB摄像机、一个红外发射器、一个红外摄像头以 2.1 Kinect标定 及一组麦克风阵列组成,如图2所示.普通RGB摄 摄像机标定是目标检测过程中的一部分,主要 像机能够以30帧/s的速率传送640×480分辨率的 是指确定摄像机参数的过程.目前已经有许多摄 RGB图像,而红外发射器和摄像机则是用来采集相 应的深度信息,通过内部芯片转换并传送320×240 像机标定的方法,本文所用的是张正友标定法1 分辨率的深度图像. 本文对Kinect进行标定时摄像机的模型采用 的是针孔模型,其定义如下21: 红外发射器 sm =A[RI t]M, 或者 Xc T12 T13 T14 Yc T2 T24 -0 0 T32 T34 1 彩色CMOS摄像头 红外摄像头 式中:(u,)是点投影在图像平面的坐标,A为摄像机 图2 Kinect深度摄像机 的内参矩阵,[RIt]为外参矩阵,(Xc,Yc,Zc)是点在 Fig.2 Kinect depth camera 摄像机坐标系下的坐标,镊像机坐标系中任意一点投 Kinect在系统中的位置如图1所示,位于天花 影到图像坐标系的公式如式(1)、(2)所示 板顶部,机械臂的斜上方.其位置的选择是通过比对 X。=(x-c)2e (1) 多次实验的结果确定的.实验表明Kinect置于此地 位置视野范围最广,且可以有效地避免遮挡.作为本 y。=y-g)2e (2) 套服务机器人的“眼睛”,Kinect的主要作用是进行 目标检测. 式中:Xc、Yc为彩色图像中某点的坐标,Zc为深度 1.2模块化机械臂 图像中相同像素点的深度值.然而Kinect生成的彩 系统中的模块化机械臂,是由德国Schunk公司开 色图像和深度图像并不是完全重合的,故在计算之 发并生产的Power Cube模块组合而成,共7个关节,有 前需要对彩色图像和深度图像进行匹配.实验表明, 一个冗余自由度,主要用于实施清理操作.采用冗余机 OpenNI自带的函数已经可以较好地解决深度图像 械臂的目的是为了克服非冗余自由度机械臂运动不灵 的校正问题,故本文通过OpenNI自带的函数完成 活的缺点,即在规定了末端位姿轨迹后,不能避免关节 Kinect彩色图像和深度图像的配准. 空间存在的奇异点、不能避障、不能避免关节极限、在 综上表述可以得到场景内任意点在摄像机坐标 某些情况下运学性能差等8) 系下的三维坐标.为了方便后文中机械臂轨迹规划 1.3灵巧手 的内容,需要将空间内各点的三维信息都转换在机 灵巧手是本套机器人系统的末端执行器,主要 械臂基坐标系下,因此,首先需要知道摄像机坐标系