正在加载图片...
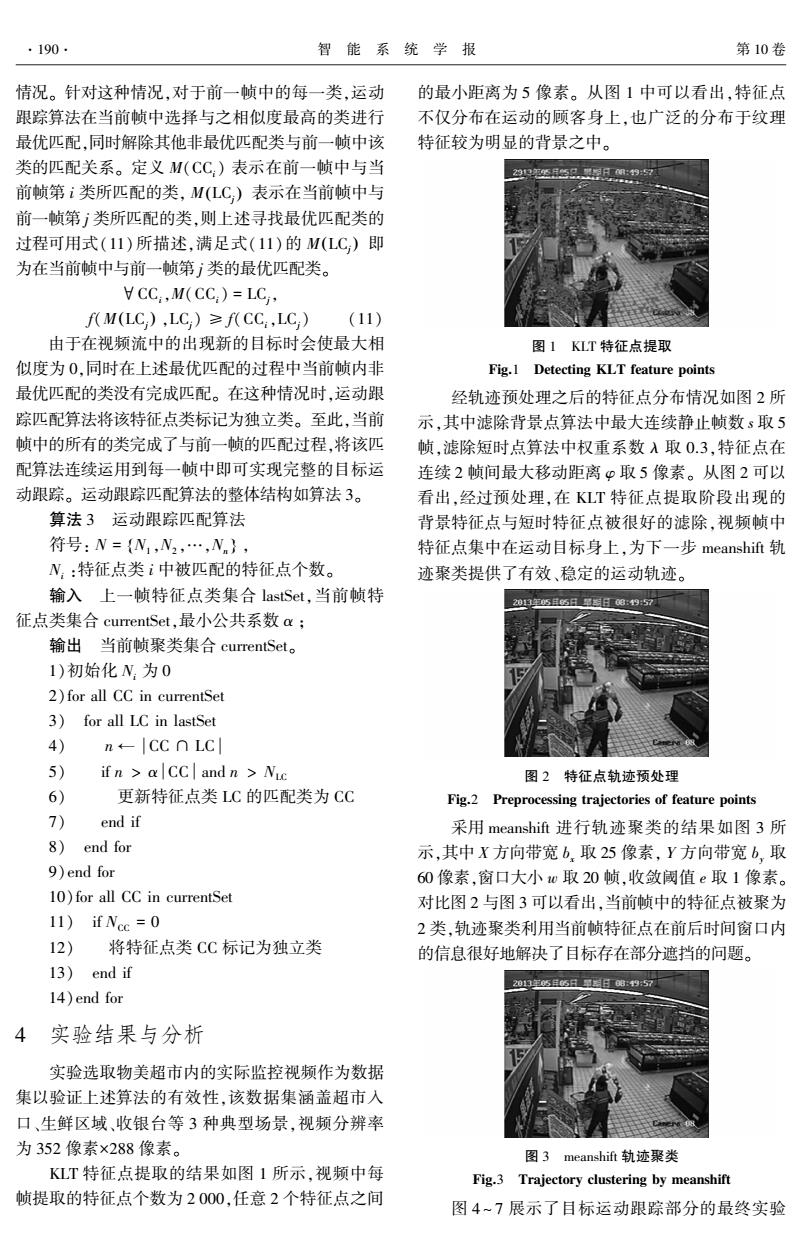
·190· 智能系统学报 第10卷 情况。针对这种情况,对于前一帧中的每一类,运动 的最小距离为5像素。从图1中可以看出,特征点 跟踪算法在当前帧中选择与之相似度最高的类进行 不仅分布在运动的顾客身上,也广泛的分布于纹理 最优匹配,同时解除其他非最优匹配类与前一帧中该 特征较为明显的背景之中。 类的匹配关系。定义M(CC:)表示在前一帧中与当 前帧第i类所匹配的类,M(LC)表示在当前帧中与 前一帧第j类所匹配的类,则上述寻找最优匹配类的 过程可用式(11)所描述,满足式(11)的M(LC:)即 为在当前帧中与前一帧第类的最优匹配类。 VCC,M(CC)=LC;, f(M(LC),LC;)f(CC:,LC;) (11) 由于在视频流中的出现新的目标时会使最大相 图1KLT特征点提取 似度为0,同时在上述最优匹配的过程中当前帧内非 Fig.1 Detecting KLT feature points 最优匹配的类没有完成匹配。在这种情况时,运动跟 经轨迹预处理之后的特征点分布情况如图2所 踪匹配算法将该特征点类标记为独立类。至此,当前 示,其中滤除背景点算法中最大连续静止帧数s取5 帧中的所有的类完成了与前一帧的匹配过程,将该匹 帧,滤除短时点算法中权重系数入取0.3,特征点在 配算法连续运用到每一帧中即可实现完整的目标运 连续2帧间最大移动距离P取5像素。从图2可以 动跟踪。运动跟踪匹配算法的整体结构如算法3。 看出,经过预处理,在KLT特征点提取阶段出现的 算法3运动跟踪匹配算法 背景特征点与短时特征点被很好的滤除,视频帧中 符号:N={N1,N2,…,Nn}, 特征点集中在运动目标身上,为下一步meanshift轨 N:特征点类i中被匹配的特征点个数。 迹聚类提供了有效、稳定的运动轨迹。 输入上一帧特征点类集合lastSet,当前帧特 2913更5且85日里日0阅:957 征点类集合currentSet,.最小公共系数a; 输出当前帧聚类集合currentSet。 1)初始化N:为0 2)for all CC in currentSet 3)for all LC in lastSet 4) n←-|CC∩LC 5) if n a CC and n Nuc 图2特征点轨迹预处理 6) 更新特征点类LC的匹配类为CC Fig.2 Preprocessing trajectories of feature points 7) end if 采用meanshift进行轨迹聚类的结果如图3所 8)end for 示,其中X方向带宽b取25像素,Y方向带宽b,取 9)end for 60像素,窗口大小0取20帧,收敛阈值e取1像素。 10)for all CC in currentSet 对比图2与图3可以看出,当前帧中的特征点被聚为 11)if Ncc =0 2类,轨迹聚类利用当前帧特征,点在前后时间窗口内 12) 将特征点类CC标记为独立类 的信息很好地解决了目标存在部分遮挡的问题。 13)end if 2013年5的日里日第9:57 14)end for 4实验结果与分析 实验选取物美超市内的实际监控视频作为数据 集以验证上述算法的有效性,该数据集涵盖超市入 口、生鲜区域、收银台等3种典型场景,视频分辨率 为352像素×288像素。 图3 meanshift轨迹聚类 KLT特征点提取的结果如图1所示,视频中每 Fig.3 Trajectory clustering by meanshift 帧提取的特征,点个数为2000,任意2个特征点之间 图4~7展示了目标运动跟踪部分的最终实验情况。 针对这种情况,对于前一帧中的每一类,运动 跟踪算法在当前帧中选择与之相似度最高的类进行 最优匹配,同时解除其他非最优匹配类与前一帧中该 类的匹配关系。 定义 M(CCi) 表示在前一帧中与当 前帧第 i 类所匹配的类, M LCj ( ) 表示在当前帧中与 前一帧第 j 类所匹配的类,则上述寻找最优匹配类的 过程可用式(11)所描述,满足式(11)的 M LCj ( ) 即 为在当前帧中与前一帧第 j 类的最优匹配类。 ∀CCi,M(CCi) = LCj, f(M LCj ( ) ,LCj) ≥ f(CCi,LCj) (11) 由于在视频流中的出现新的目标时会使最大相 似度为 0,同时在上述最优匹配的过程中当前帧内非 最优匹配的类没有完成匹配。 在这种情况时,运动跟 踪匹配算法将该特征点类标记为独立类。 至此,当前 帧中的所有的类完成了与前一帧的匹配过程,将该匹 配算法连续运用到每一帧中即可实现完整的目标运 动跟踪。 运动跟踪匹配算法的整体结构如算法 3。 算法 3 运动跟踪匹配算法 符号: N = N1 ,N2 ,…,Nn { } , Ni :特征点类 i 中被匹配的特征点个数。 输入 上一帧特征点类集合 lastSet,当前帧特 征点类集合 currentSet,最小公共系数 α ; 输出 当前帧聚类集合 currentSet。 1)初始化 Ni 为 0 2)for all CC in currentSet 3) for all LC in lastSet 4) n ← CC ∩ LC 5) if n > α CC and n > NLC 6) 更新特征点类 LC 的匹配类为 CC 7) end if 8) end for 9)end for 10)for all CC in currentSet 11) if NCC = 0 12) 将特征点类 CC 标记为独立类 13) end if 14)end for 4 实验结果与分析 实验选取物美超市内的实际监控视频作为数据 集以验证上述算法的有效性,该数据集涵盖超市入 口、生鲜区域、收银台等 3 种典型场景,视频分辨率 为 352 像素×288 像素。 KLT 特征点提取的结果如图 1 所示,视频中每 帧提取的特征点个数为 2 000,任意 2 个特征点之间 的最小距离为 5 像素。 从图 1 中可以看出,特征点 不仅分布在运动的顾客身上,也广泛的分布于纹理 特征较为明显的背景之中。 图 1 KLT 特征点提取 Fig.1 Detecting KLT feature points 经轨迹预处理之后的特征点分布情况如图 2 所 示,其中滤除背景点算法中最大连续静止帧数 s 取 5 帧,滤除短时点算法中权重系数 λ 取 0.3,特征点在 连续 2 帧间最大移动距离 φ 取 5 像素。 从图 2 可以 看出,经过预处理,在 KLT 特征点提取阶段出现的 背景特征点与短时特征点被很好的滤除,视频帧中 特征点集中在运动目标身上,为下一步 meanshift 轨 迹聚类提供了有效、稳定的运动轨迹。 图 2 特征点轨迹预处理 Fig.2 Preprocessing trajectories of feature points 采用 meanshift 进行轨迹聚类的结果如图 3 所 示,其中 X 方向带宽 bx 取 25 像素, Y 方向带宽 by 取 60 像素,窗口大小 w 取 20 帧,收敛阈值 e 取 1 像素。 对比图 2 与图 3 可以看出,当前帧中的特征点被聚为 2 类,轨迹聚类利用当前帧特征点在前后时间窗口内 的信息很好地解决了目标存在部分遮挡的问题。 图 3 meanshift 轨迹聚类 Fig.3 Trajectory clustering by meanshift 图 4 ~ 7 展示了目标运动跟踪部分的最终实验 ·190· 智 能 系 统 学 报 第 10 卷